Pan and Tilt Shield¶
De Pan and Tilt Shield geeft de OpenMV Cam drie servokanalen met een NCP1117 5 V lineaire regelaar die zowel de camera als de servo’s voedt vanuit één enkele batterij-ingang van 6,5–18 V.

Voor de volledige datasheet, foto’s en bestelinformatie, zie de productpagina van de Pan and Tilt Shield.
Hoogtepunten¶
Drie onafhankelijke servokanalen
Stapelt met de Servo Shield
Pinout¶
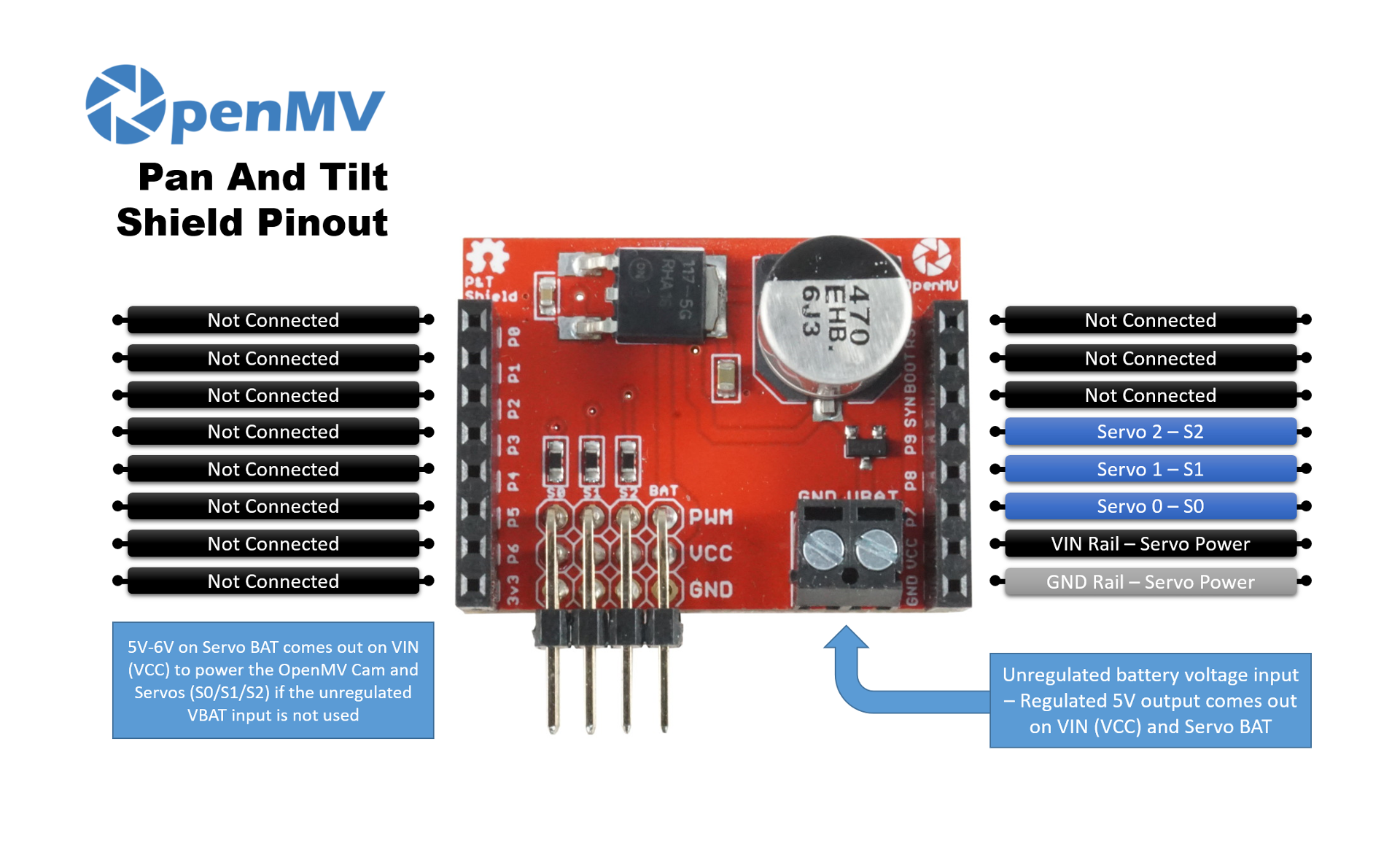
Pinreferentie¶
Pin |
Functie |
|---|---|
P7 |
Servo 0 (S0) |
P8 |
Servo 1 (S1) |
P9 |
Servo 2 (S2) |
VBAT in |
6,5–18 V batterij-ingang op het schroefklemmenblok (NCP1117-limieten) |
VIN uit |
5 V gereguleerd vanuit de NCP1117 op de print — voedt zowel de camera als de servo-rail |
GND-rail |
Gemeenschappelijke aarde van servo en camera |
Gebruik¶
Stuur de drie servokanalen aan met 50 Hz PWM. Het bereik van de pulsbreedte verschilt per servo, dus stel MIN_US en MAX_US af op die van jou — typische waarden liggen rond 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)