PIR Shield¶
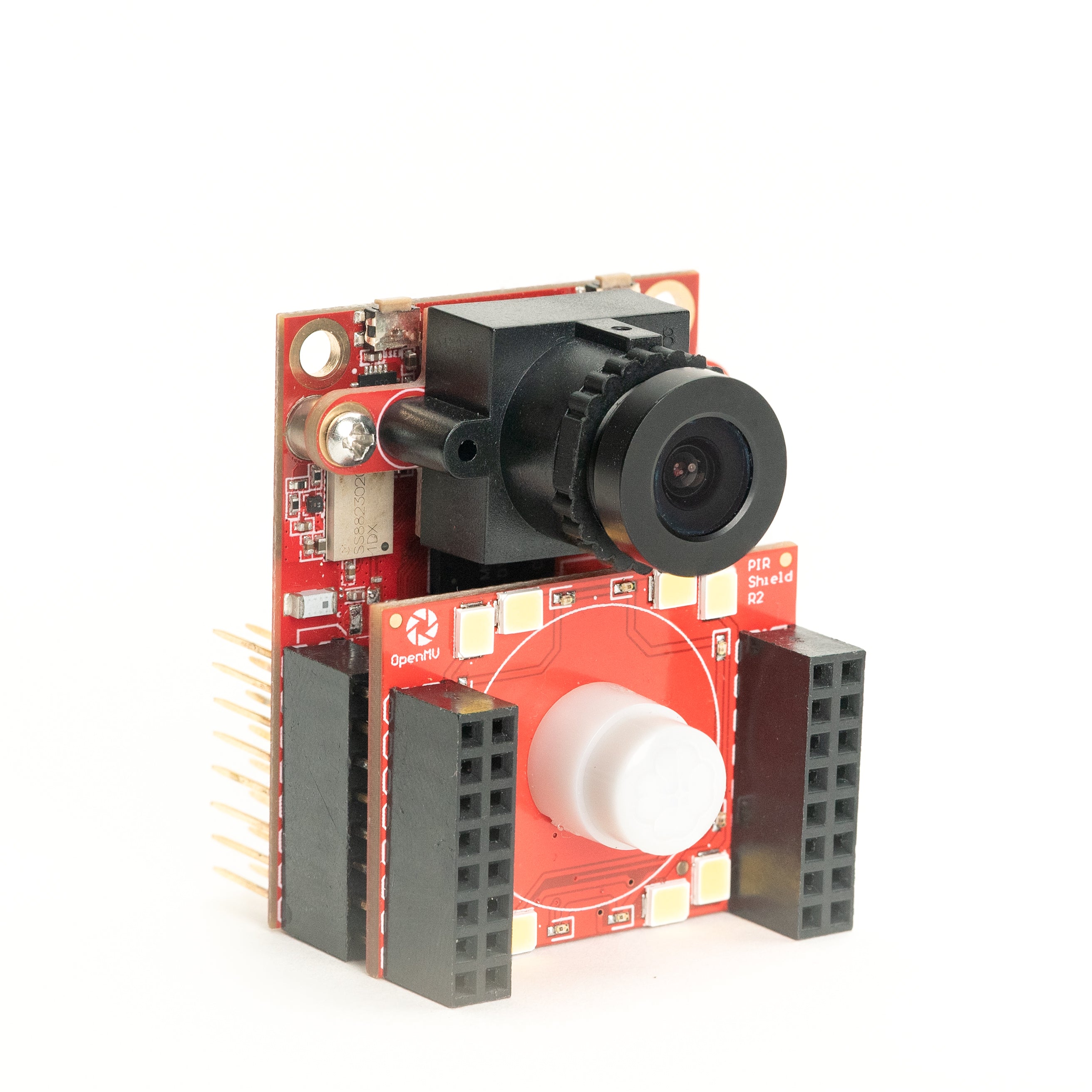
De PIR Shield wekt de OpenMV Cam bij beweging uit de diepe slaap, verbruikt een ultralage 6 µA in stand-by en voegt acht witte plus acht 850 nm infrarood-LED’s toe voor verlichting. Ideaal voor batterijgevoede bewaking en wildcamera’s.
Voor de volledige datasheet, foto’s en bestelinformatie, zie de productpagina van de PIR Shield.
Hoogtepunten¶
6 µA stand-by PIR-sensor voor jaren batterijgebruik
Acht 3500 K witte LED’s en acht 850 nm IR-LED’s (PWM-dimbaar)
Pinout¶
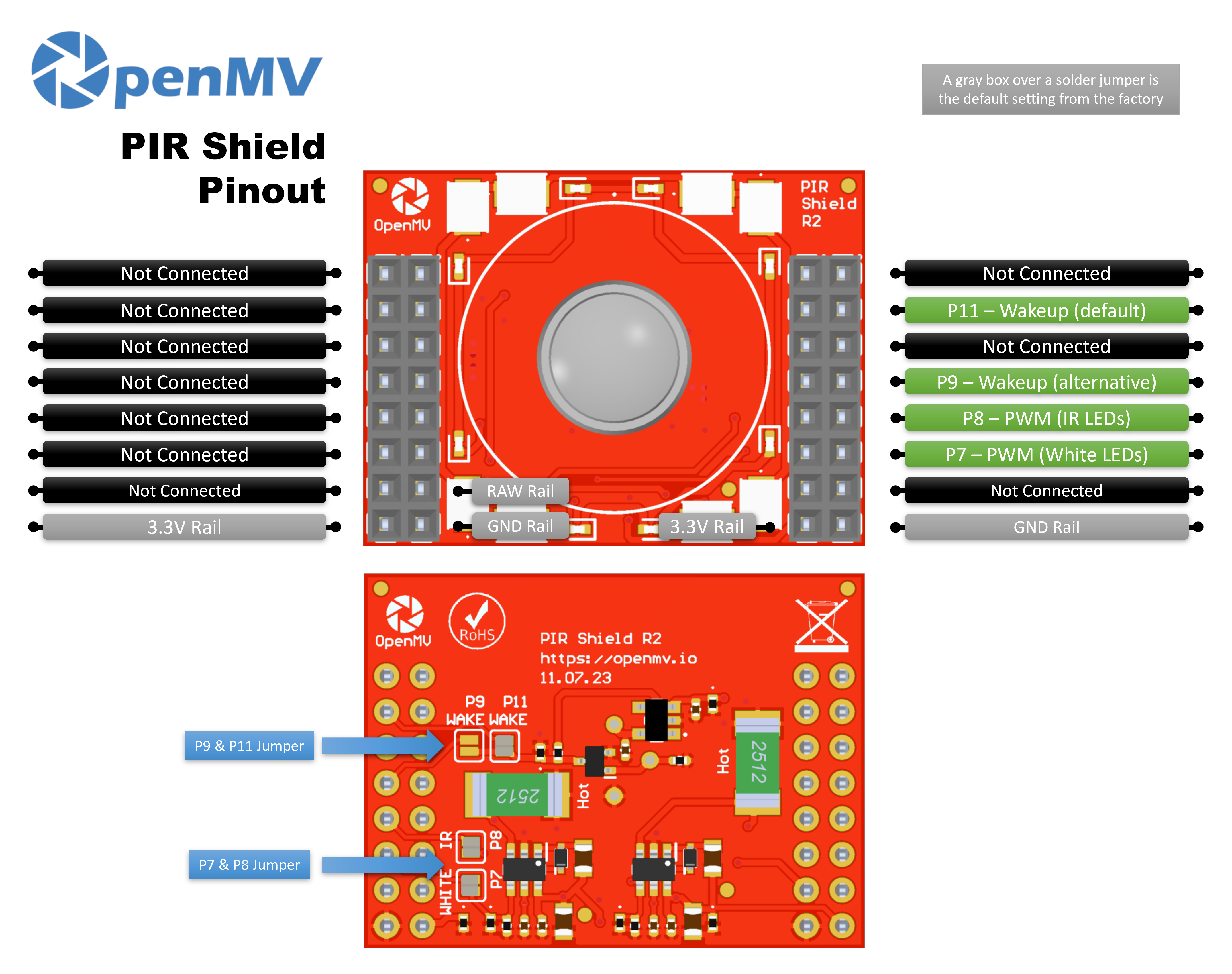
Pinreferentie¶
Pin |
Functie |
|---|---|
P7 |
PWM-besturing voor de witte LED’s |
P8 |
PWM-besturing voor de 850 nm IR-LED’s |
P9 |
Wakeup (alternatief) |
P11 |
Wakeup (standaard) — trekt laag wanneer de PIR beweging detecteert |
RAW-rail |
Altijd-aan voeding voor de PIR-sensor — houdt bewegingsdetectie actief terwijl de camera in diepe slaap is |
3.3V-rail |
Voedt de elektronica op de print van de shield |
GND-rail |
Gemeenschappelijke aarde |
Notitie
Elk van P7, P8, P9 en P11 kan worden teruggewonnen voor ongerelateerd gebruik. P7, P8 en P11 zijn standaard verbonden via soldeerjumpers aan de achterkant — open de jumper op elke pin die je wilt vrijmaken. P9 is standaard losgekoppeld: overbrug de jumper aan de achterkant om het wakeup-signaal in plaats daarvan naar P9 te routeren (en open de achterkant-jumper van P11 om P11 vrij te geven).
Notitie
P11 is de wakeup-pin op alle moderne OpenMV Cams — laat de shield op de standaardtoewijzing staan voor bewegingsontwaken met deepsleep(). Het alternatief P9 bestaat voor oudere OpenMV Cams, die geen speciale wakeup-lijn hebben — P9 komt uit op een gewone GPIO die je in plaats daarvan zou pollen of waaraan je een IRQ zou koppelen.
Gebruik¶
Dim de witte en IR-verlichtings-LED’s met PWM:
from machine import PWM, Pin
white = PWM(Pin("P7"), freq=50_000, duty_u16=0)
ir = PWM(Pin("P8"), freq=50_000, duty_u16=0)
white.duty_u16(32_768) # 50% white
ir.duty_u16(16_384) # 25% IR
Wek de camera bij beweging uit de diepe slaap. P11 (de standaard wakeup-lijn) trekt laag wanneer de PIR triggert en reset de camera:
from machine import deepsleep
deepsleep() # the next motion event resets the camera