PIR Shield¶
Il PIR Shield risveglia l’OpenMV Cam dal deep sleep in presenza di movimento, assorbe appena 6 µA ultra-bassi in standby e aggiunge otto LED bianchi più otto LED infrarossi a 850 nm per l’illuminazione. Ideale per la sorveglianza a batteria e le fototrappole.
Per il datasheet completo, le foto e gli ordini consulta la pagina prodotto del PIR Shield.
Punti salienti¶
Sensore PIR con standby da 6 µA per anni di funzionamento a batteria
Otto LED bianchi a 3500 K e otto LED IR a 850 nm (regolabili tramite PWM)
Pinout¶
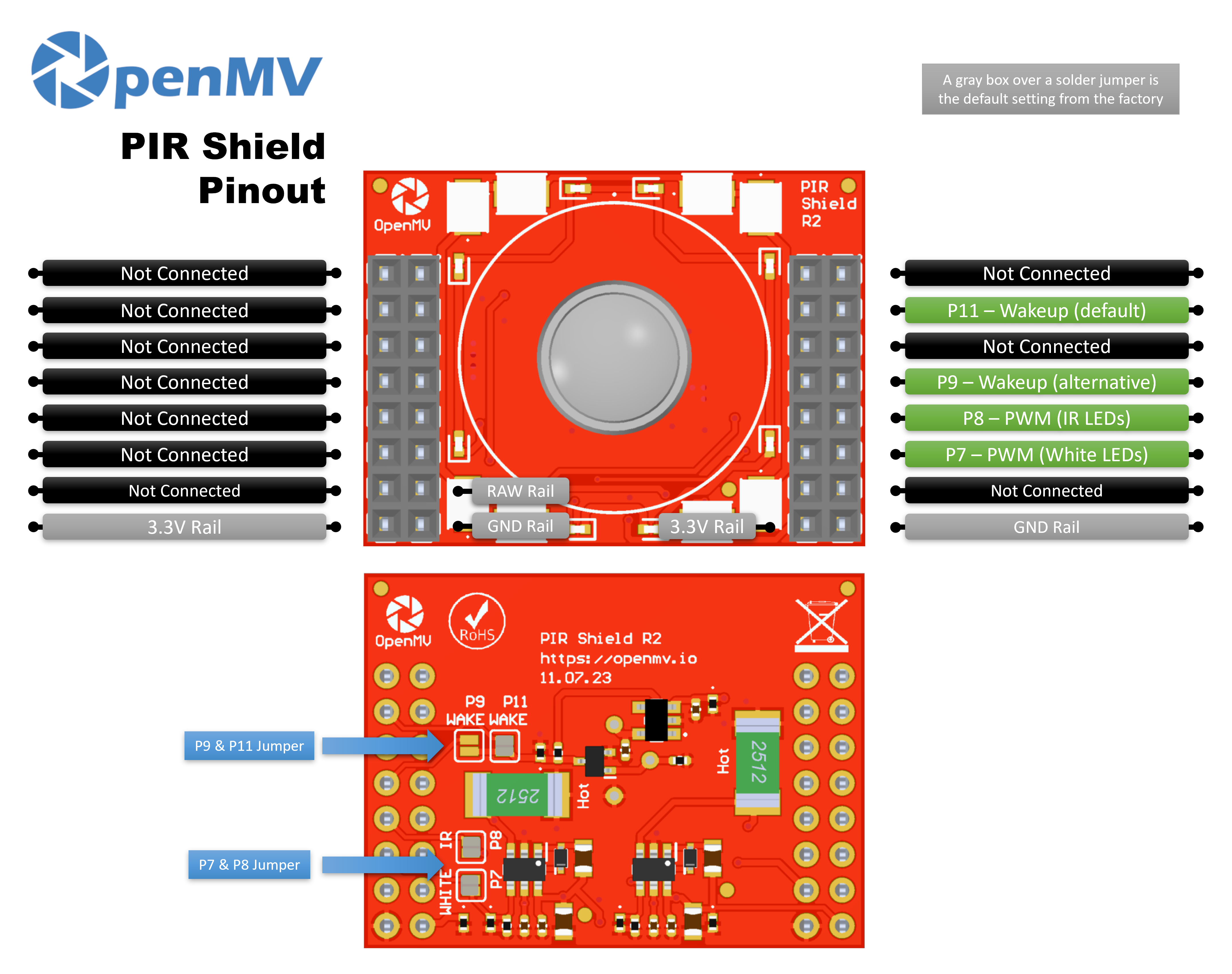
Riferimento dei pin¶
Pin |
Funzione |
|---|---|
P7 |
Controllo PWM per i LED bianchi |
P8 |
Controllo PWM per i LED IR a 850 nm |
P9 |
Wakeup (alternativo) |
P11 |
Wakeup (predefinito) — si porta a livello basso quando il PIR rileva movimento |
Linea RAW |
Alimentazione sempre attiva per il sensore PIR — mantiene attivo il rilevamento del movimento mentre la camera è in deep sleep |
Linea 3.3V |
Alimenta l’elettronica on-board dello shield |
Linea GND |
Massa comune |
Nota
Ciascuno dei pin P7, P8, P9 e P11 può essere recuperato per un uso non correlato. P7, P8 e P11 sono collegati per impostazione predefinita tramite jumper a saldare sul retro — apri il jumper su qualsiasi pin che vuoi liberare. P9 è scollegato per impostazione predefinita: ponticella il suo jumper sul retro per instradare il segnale di wakeup su P9 (e apri il jumper sul retro di P11 per liberare P11).
Nota
P11 è il pin di wakeup su tutte le OpenMV Cam moderne — lascia lo shield sulla sua mappatura predefinita per il risveglio da movimento con deepsleep(). L’alternativa P9 esiste per le OpenMV Cam legacy, che non dispongono di una linea di wakeup dedicata — P9 finisce su un normale GPIO che dovresti invece interrogare in polling o a cui collegare un IRQ.
Utilizzo¶
Regola tramite PWM la luminosità dei LED di illuminazione bianchi e IR:
from machine import PWM, Pin
white = PWM(Pin("P7"), freq=50_000, duty_u16=0)
ir = PWM(Pin("P8"), freq=50_000, duty_u16=0)
white.duty_u16(32_768) # 50% white
ir.duty_u16(16_384) # 25% IR
Risveglia la camera dal deep sleep in presenza di movimento. P11 (la linea di wakeup predefinita) si porta a livello basso quando il PIR si attiva e resetta la camera:
from machine import deepsleep
deepsleep() # the next motion event resets the camera