PIR Shield¶
PIR Shield probouzí OpenMV Cam z hlubokého spánku při pohybu, v pohotovostním režimu odebírá ultra nízkých 6 µA a přidává osm bílých plus osm infračervených LED diod 850 nm pro osvětlení. Ideální pro bateriově napájené sledování a fotopasti.
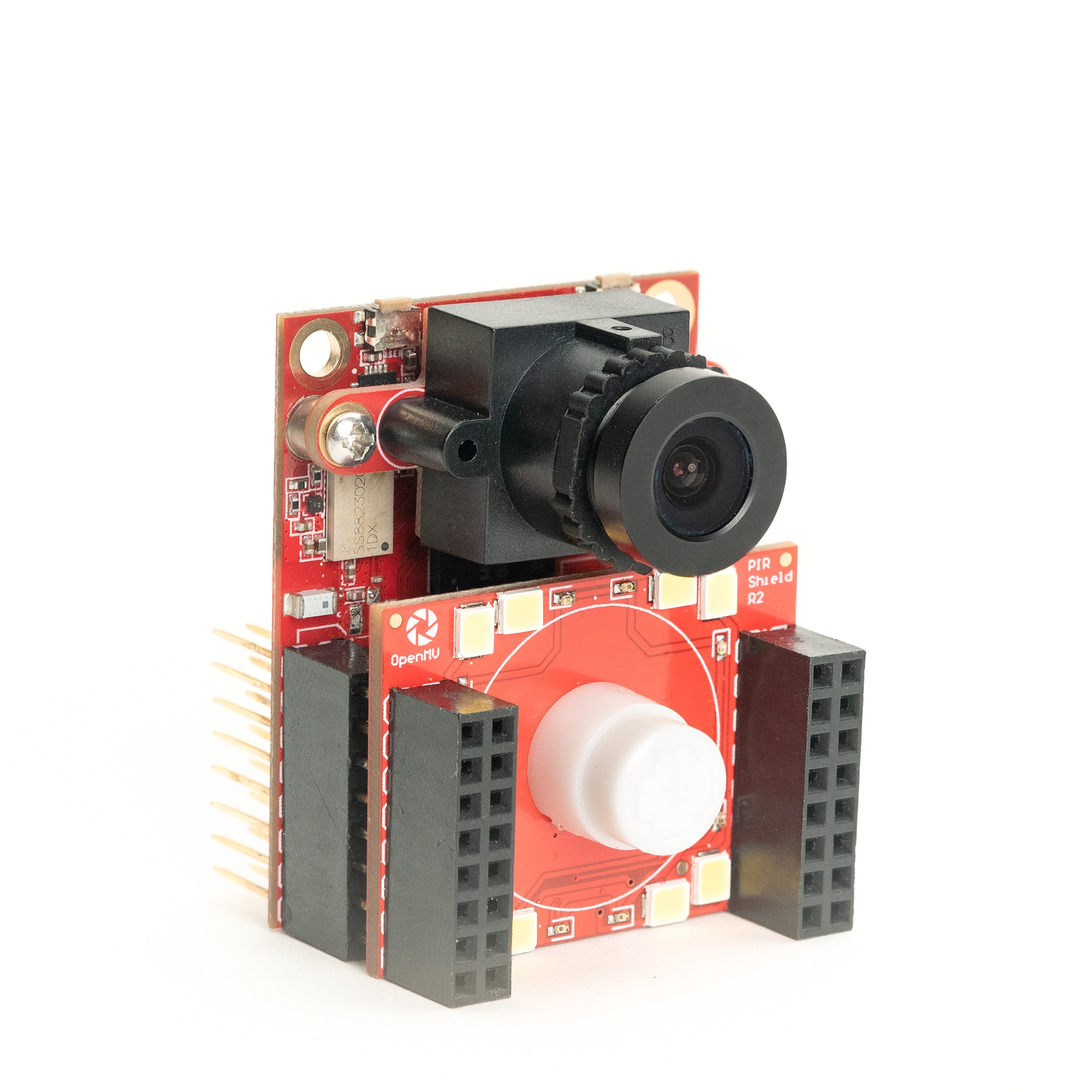
Kompletní katalogový list, fotografie a možnost objednání najdete na produktové stránce PIR Shield.
Přehled¶
PIR senzor s pohotovostním odběrem 6 µA pro roky bateriového provozu
Osm bílých LED diod 3500 K a osm IR LED diod 850 nm (stmívatelných přes PWM)
Rozložení pinů¶
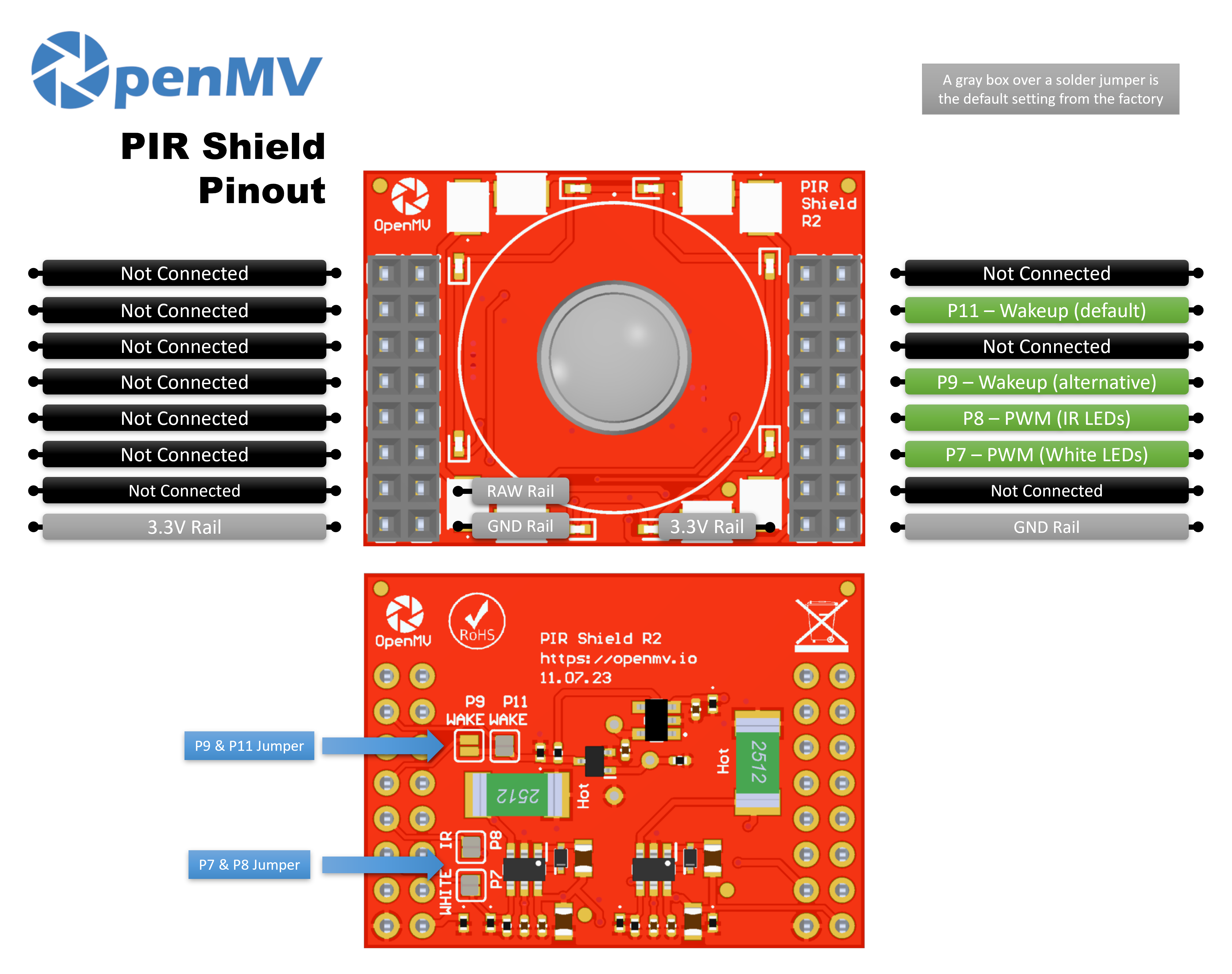
Reference pinů¶
Pin |
Funkce |
|---|---|
P7 |
Řízení bílých LED diod přes PWM |
P8 |
Řízení IR LED diod 850 nm přes PWM |
P9 |
Probuzení (alternativní) |
P11 |
Probuzení (výchozí) — stáhne se na nízkou úroveň, když PIR detekuje pohyb |
Větev RAW |
Stále zapnuté napájení pro PIR senzor — udržuje detekci pohybu aktivní, zatímco je kamera v hlubokém spánku |
Větev 3,3V |
Napájí palubní elektroniku shieldu |
Větev GND |
Společná zem |
Poznámka
Každý z pinů P7, P8, P9 a P11 lze znovu využít pro jiný účel. P7, P8 a P11 jsou ve výchozím nastavení propojeny pájecími propojkami na zadní straně — rozpojte propojku libovolného pinu, který chcete uvolnit. P9 je ve výchozím nastavení odpojen: přemostěním jeho propojky na zadní straně směřujete signál probuzení místo toho na P9 (a rozpojením zadní propojky P11 uvolníte P11).
Poznámka
P11 je pin probuzení na všech moderních OpenMV Cam — pro probuzení pohybem v režimu deepsleep() ponechte shield na jeho výchozím mapování. Alternativa P9 existuje pro starší OpenMV Cam, které nemají vyhrazenou linku probuzení — P9 ústí na běžné GPIO, které byste místo toho dotazovali nebo k němu připojili IRQ.
Použití¶
Stmívejte přes PWM bílé a IR osvětlovací LED diody:
from machine import PWM, Pin
white = PWM(Pin("P7"), freq=50_000, duty_u16=0)
ir = PWM(Pin("P8"), freq=50_000, duty_u16=0)
white.duty_u16(32_768) # 50% white
ir.duty_u16(16_384) # 25% IR
Probuďte kameru z hlubokého spánku při pohybu. P11 (výchozí linka probuzení) se stáhne na nízkou úroveň, když PIR spustí, a resetuje kameru:
from machine import deepsleep
deepsleep() # the next motion event resets the camera