PIR Shield¶
PIR Shield herättää OpenMV Cam -kameran syväunesta liikkeestä, kuluttaa erittäin alhaisen 6 µA:n virran valmiustilassa ja lisää kahdeksan valkoista sekä kahdeksan 850 nm:n infrapuna-LEDiä valaistukseen. Ihanteellinen akkukäyttöiseen valvontaan ja riistakameroihin.
Täydellisen datalehden, valokuvat ja tilaustiedot löydät PIR Shield -tuotesivulta.
Kohokohdat¶
6 µA:n valmiustilan PIR-sensori vuosien akkukäyttöä varten
Kahdeksan 3500 K:n valkoista LEDiä ja kahdeksan 850 nm:n IR-LEDiä (PWM-himmennettäviä)
Nastat¶
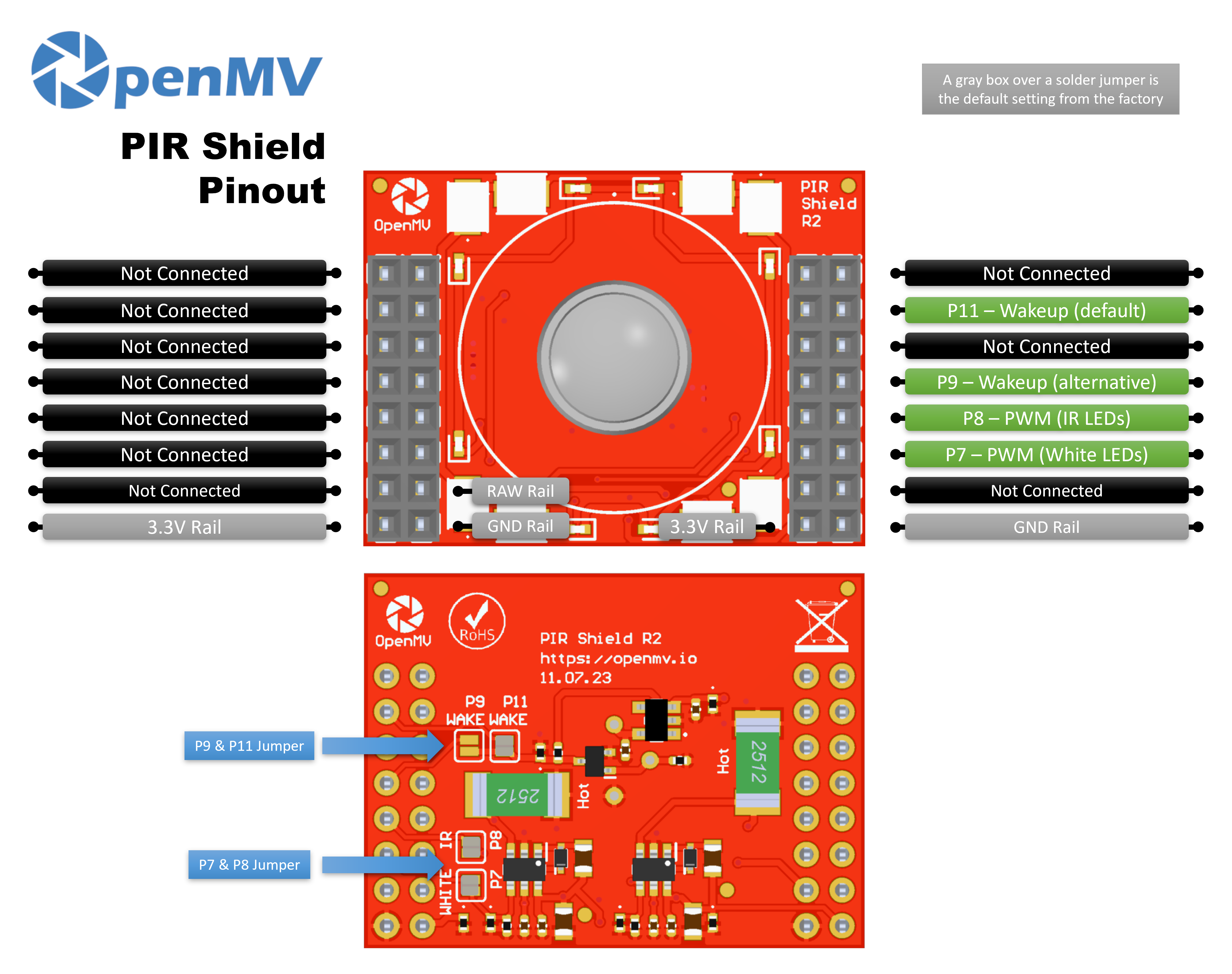
Nastaviite¶
Nasta |
Toiminto |
|---|---|
P7 |
PWM-ohjaus valkoisille LEDeille |
P8 |
PWM-ohjaus 850 nm:n IR-LEDeille |
P9 |
Herätys (vaihtoehtoinen) |
P11 |
Herätys (oletus) — vetää alas, kun PIR havaitsee liikettä |
RAW-kisko |
Aina päällä oleva virta PIR-sensorille — pitää liikkeentunnistuksen toiminnassa, kun kamera on syväunessa |
3,3 V:n kisko |
Syöttää suojuksen oman elektroniikan virran |
GND-kisko |
Yhteinen maa |
Muista
Jokainen nasta P7, P8, P9 ja P11 voidaan ottaa muuhun käyttöön. P7, P8 ja P11 on oletuksena kytketty takapuolen juotoshyppyjen kautta — avaa minkä tahansa vapautettavan nastan hyppy. P9 on oletuksena irrotettu: silloita sen takapuolen hyppy ohjataksesi herätyssignaalin sen sijaan nastaan P9 (ja avaa P11:n takapuolen hyppy vapauttaaksesi P11:n).
Muista
P11 on herätysnasta kaikissa nykyaikaisissa OpenMV Cam -kameroissa — jätä suojus oletuskytkentäänsä deepsleep() -liikeherätystä varten. P9-vaihtoehto on olemassa vanhoja OpenMV Cam -kameroita varten, joissa ei ole erillistä herätyslinjaa — P9 osuu tavalliseen GPIO-nastaan, jota pollaisit tai johon liittäisit sen sijaan IRQ:n.
Käyttö¶
PWM-himmennä valkoiset ja IR-valaistus-LEDit:
from machine import PWM, Pin
white = PWM(Pin("P7"), freq=50_000, duty_u16=0)
ir = PWM(Pin("P8"), freq=50_000, duty_u16=0)
white.duty_u16(32_768) # 50% white
ir.duty_u16(16_384) # 25% IR
Herätä kamera syväunesta liikkeestä. P11 (oletusherätyslinja) vetää alas, kun PIR laukeaa, ja nollaa kameran:
from machine import deepsleep
deepsleep() # the next motion event resets the camera