Servo Shield¶
Servo Shieldは、PCA9685サーボ/PWMコントローラを使用して、OpenMV CamからI2C経由で最大8個のホビーサーボを並列駆動します。
完全なデータシート、写真、注文については Servo Shield製品ページ を参照してください。
ハイライト¶
PCA9685サーボ/PWMコントローラ
I2C経由の8つの独立したサーボチャンネル
Motor ShieldおよびPan and Tilt Shieldとスタック可能
ピン配置¶
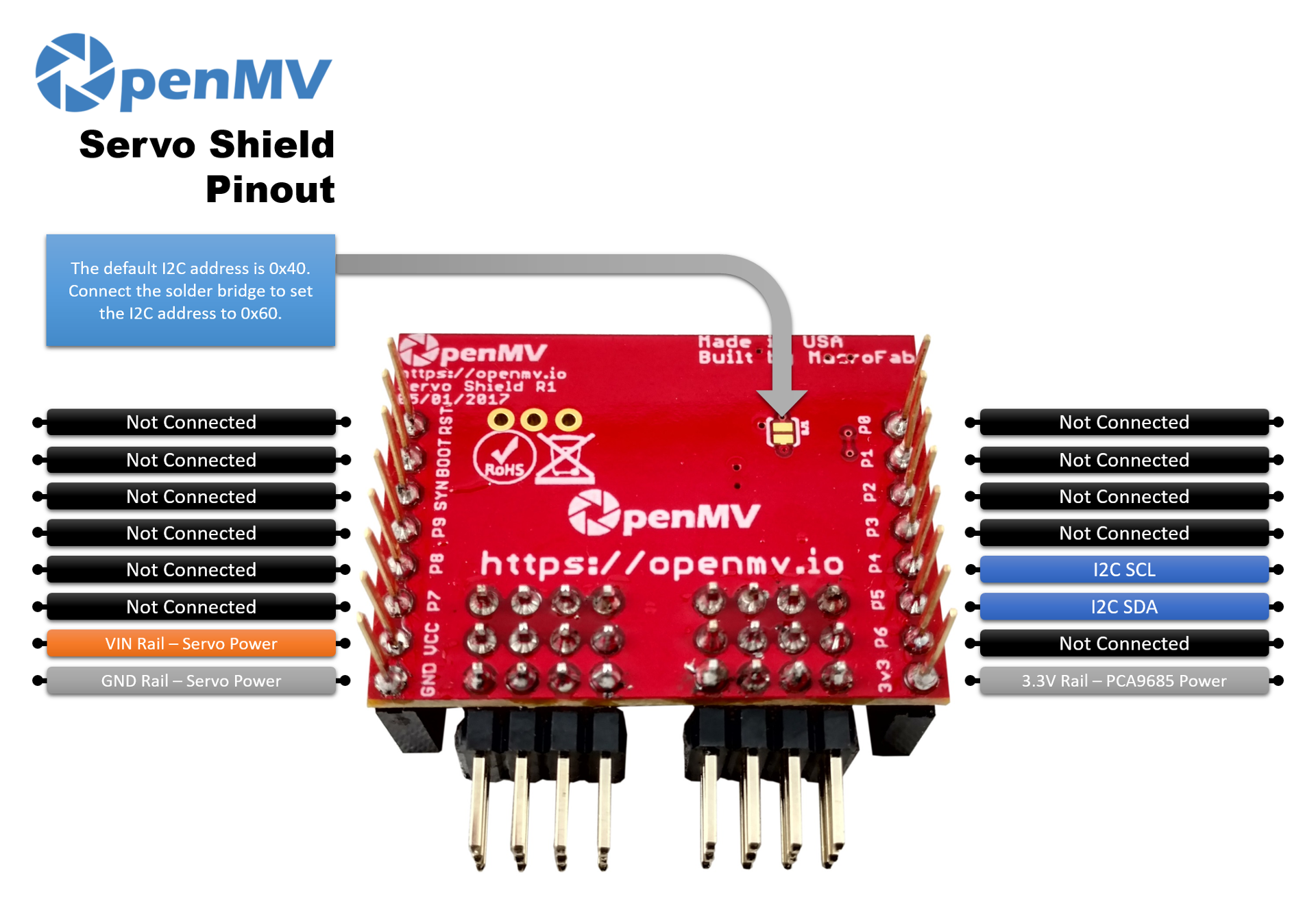
ピンリファレンス¶
ピン |
機能 |
|---|---|
P4 |
I²C SCL — PCA9685へのクロック |
P5 |
I²C SDA — PCA9685へのデータ |
VINレール |
サーボへ給電(カメラのVINピンから) |
3.3Vレール |
PCA9685のロジックへ給電 |
GNDレール |
サーボとカメラの共通グランド |
デフォルトのI²Cアドレスは 0x40 です。オンボードのはんだブリッジを接続すると、アドレスを 0x60 に変更できます。
注釈
シールドはサーボの電源をカメラのVINピンから直接引き込みます。USBはどのOpenMV CamでもVINに給電しないため、VINは外部から供給する必要があります(バッテリー、ベンチ電源など)。駆動予定のすべてのサーボの合計ストール電流に対応した定格の電源を選んでください。
使い方¶
I²C経由でPCA9685を通じて8つのサーボチャンネルを駆動します。パルス幅の範囲はサーボによって異なるため、お使いのサーボに合わせて MIN_US と MAX_US を調整してください。一般的な値はおよそ1000~2000 µsです:
import time
from machine import SoftI2C, Pin
class PCA9685:
"""Minimal PCA9685 driver — 12-bit PWM on any of 8 channels."""
def __init__(self, bus, address=0x40, freq=50):
self._bus = bus
self._addr = address
bus.writeto_mem(address, 0x00, b"\x00") # reset Mode1
prescale = round(25_000_000 / (4096 * freq)) - 1
bus.writeto_mem(address, 0x00, b"\x10") # sleep
bus.writeto_mem(address, 0xFE, bytes([prescale])) # prescale
bus.writeto_mem(address, 0x00, b"\x00") # wake
time.sleep_us(5)
bus.writeto_mem(address, 0x00, b"\xA1") # restart + AI + allcall
self._period_us = 1_000_000 // freq
def set_duty(self, channel, duty):
duty &= 0xFFF # 12-bit
if duty == 0:
on, off = 0, 0x1000 # FULL_OFF
elif duty == 0xFFF:
on, off = 0x1000, 0 # FULL_ON
else:
on, off = 0, duty
self._bus.writeto_mem(
self._addr, 0x06 + 4 * channel,
bytes([on & 0xFF, on >> 8, off & 0xFF, off >> 8]))
def set_us(self, channel, pulse_us):
self.set_duty(channel, (pulse_us * 4096) // self._period_us)
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=50)
def angle(channel, deg):
pca.set_us(channel, MIN_US + (deg * (MAX_US - MIN_US)) // 180)
while True:
for ch in range(8):
angle(ch, 0)
time.sleep_ms(2000)
for ch in range(8):
angle(ch, 180)
time.sleep_ms(2000)
PCA9685は任意の周波数で一般的な12ビットPWMも扱えます。同じクラスを set_duty(0~4095)で再利用すると、たとえばチャンネル0のLEDを1 kHzでフェードさせることができます。以下のヘルパーは、0.0~100.0%の浮動小数点値をチップの0~4095のデューティ範囲にスケーリングします:
import time
from machine import SoftI2C, Pin
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=1000)
def brightness(channel, pct):
pca.set_duty(channel, int(pct * 4095 / 100))
while True:
# Ramp up 0 → 100%.
for pct in range(101):
brightness(0, float(pct))
time.sleep_ms(20)
# Ramp down 100 → 0%.
for pct in reversed(range(101)):
brightness(0, float(pct))
time.sleep_ms(20)