CAN/RS232 Shield¶
تجمع لوحة CAN/RS232 Shield بين جهاز إرسال واستقبال CAN-FD وجهاز إرسال واستقبال RS-232 بحيث يمكن لكاميرا OpenMV Cam التواصل مع المركبات ووحدات التحكم والأجهزة التسلسلية القديمة من خلال shield واحد، مع طاقة بمدخل واسع وحماية من عكس الجهد.
للاطلاع على ورقة البيانات الكاملة والصور وطلب الشراء، راجع صفحة منتج CAN/RS232 Shield.
أبرز الميزات¶
CAN-FD بسرعة 8 Mb/s مع إنهاء وتصفية على اللوحة
RS-232 بسرعة 1 Mb/s مع تصفية مدمجة
مدخل 6-36 V، يتحمّل عكس الجهد
مدخل ADC بنطاق 0-5 V مع حماية من فرط الجهد بمقدار ±36 V
دخل/خرج رقمي بنطاق 0-5 V لمشغّلات مزامنة الكاميرا، محمي من الدائرة القصيرة
مخطط الدبابيس¶
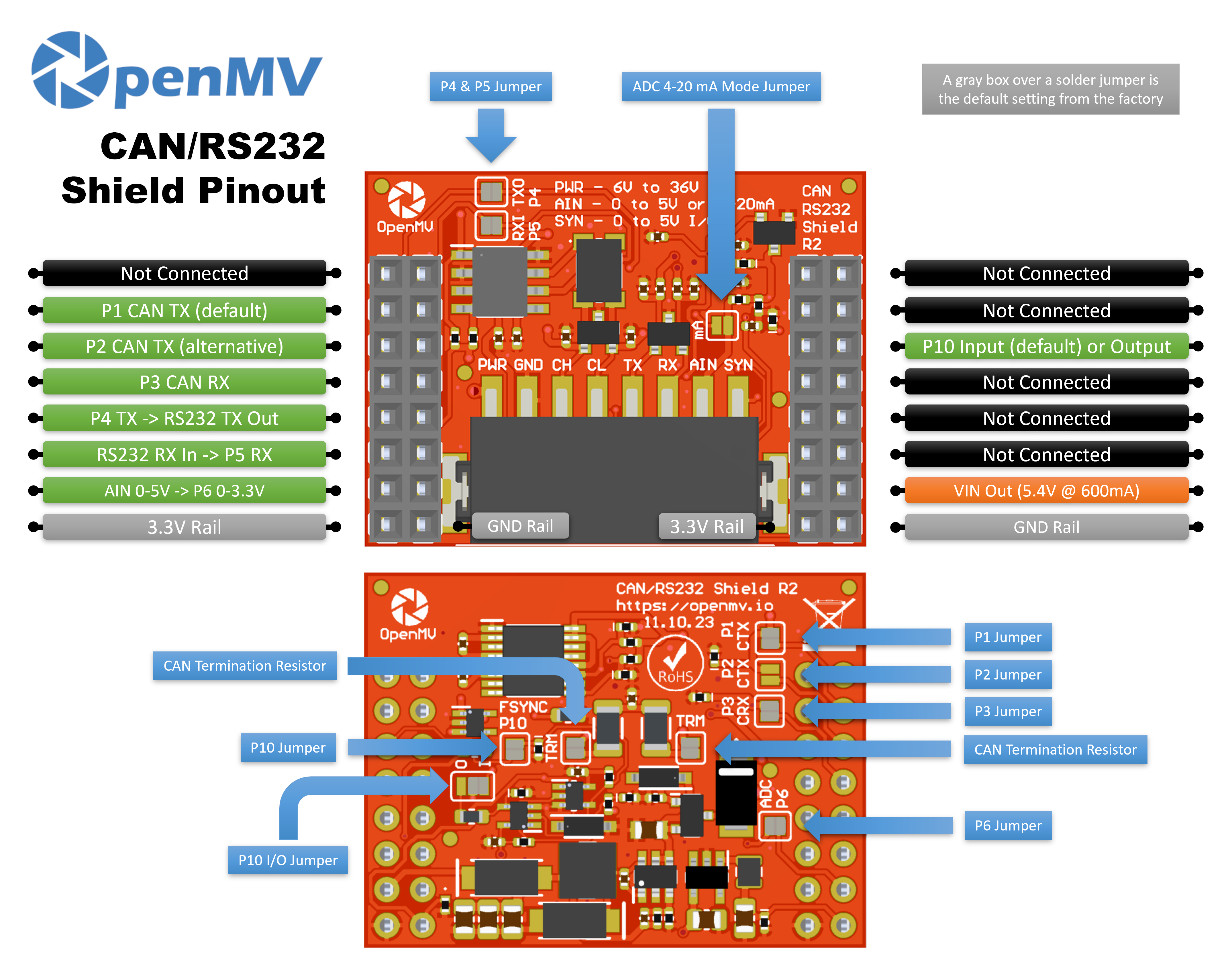
مرجع الدبابيس¶
الدبوس |
الوظيفة |
|---|---|
P1 |
CAN TX → دخل جهاز الإرسال والاستقبال (الافتراضي) |
P2 |
CAN TX → دخل جهاز الإرسال والاستقبال (البديل) |
P3 |
CAN RX ← خرج جهاز الإرسال والاستقبال |
P4 |
RS-232 TX → يقود الخط للخارج |
P5 |
RS-232 RX ← يستقبل الخط للداخل |
P6 |
قراءة AIN مُحوَّلة المستوى (0–3.3 V على P6) |
P10 |
SYN — دخل/خرج رقمي مفتوح المصرف على كتلة الأطراف |
دخل PWR |
مدخل واسع 6–36 V على كتلة الأطراف (يتحمّل عكس الجهد) |
دخل AIN |
مدخل تناظري على كتلة الأطراف |
خرج VIN |
5.4 V حتى 600 mA من المنظّم الموجود على اللوحة |
خط 3.3V |
تُغذّي الإلكترونيات الموجودة على لوحة الـ shield |
خط GND |
أرضي مشترك |
ملاحظة
AIN محمي من فرط الجهد حتى ±36 V، وهو افتراضياً مدخل جهد بنطاق 0–5 V، يُخفَّض إلى 0–3.3 V على P6. اجسر شنط وضع 4–20 mA على واجهة الـ shield لتحويل AIN إلى مدخل حلقة تيار 4–20 mA.
ملاحظة
SYN خط رقمي مفتوح المصرف، مرفوع إلى 3.3 V على جانب الكاميرا وإلى 5 V على جانب طرف SYN. وهو افتراضياً مدخل — يقوم الـ shield بتحويل المستوى من 0–5 V على SYN نزولاً إلى 0–3.3 V على P10. غيّر وصلة اللحام الموجودة على اللوحة لقلب P10 إلى خرج، مع تحويل المستوى من 0–3.3 V على P10 صعوداً إلى 0–5 V على SYN.
ملاحظة
يمكن استعادة كل من P1 وP2 وP3 وP4 وP5 وP6 وP10 لاستخدام غير ذي صلة. وتكون P1 وP3 وP4 وP5 وP6 وP10 موصولة افتراضياً — حيث تكون P1 وP3 وP6 وP10 عبر وصلات لحام في الجانب الخلفي، وP4 وP5 عبر وصلات لحام في الجانب الأمامي. افتح الوصلة على أي دبوس تريد تحريره. وتكون P2 افتراضياً مفصولة: اجسر وصلتها الخلفية لتوجيه CAN TX إلى P2 بدلاً من ذلك (وافتح وصلة P1 الخلفية لتحرير P1).
ملاحظة
يوجد تقسيم P1/P2 لكي يعمل الـ shield عبر مختلف عائلات المعالجات. يمكن للوحات OpenMV Cam IMXRT (RT1062) توجيه CAN إلى P1، لذا تستخدم التخطيط الافتراضي. أما لوحات STM32 فلا يمكنها الوصول إلى P1 بطرفية CAN الخاصة بها، لذا اجسر وصلة P2 الخلفية (وافتح وصلة P1) لاستخدام البديل.
ملاحظة
إنهاء ناقل CAN موصول افتراضياً — مقسّماً إلى نصفين بقيمة 60 Ω على التوالي بين CANH وCANL مع مكثّف إلى الأرضي عند نقطة المنتصف (إنهاء مقسّم بقيمة 120 Ω مقترن بالتيار المتردد). افتح وسادتي اللحام لفصل كل نصف على حدة.
الاستخدام¶
ملاحظة
تتبع أرقام الطرفيات CAN(0) وUART(1) أدناه تخطيط IMXRT (توصيل P1 الافتراضي). على معالج آخر قد يكون الناقل الموصول بهذه الدبابيس مختلفاً — راجع مرجع لوحتك.
أرسل واستقبل إطارات CAN-FD — TX على P1 (الافتراضي) أو P2 (البديل)، وRX على P3:
from machine import CAN
can = CAN(2, 1_000_000)
can.set_filters(None)
can.send(0x123, b"\xDE\xAD\xBE\xEF")
print(can.recv())
ردّد البايتات عبر RS-232 على P4 (TX) / P5 (RX):
from machine import UART
uart = UART(1, baudrate=115200)
uart.write("hello\n")
print(uart.read())
اقرأ مدخل كتلة أطراف AIN عبر دبوس P6 المُحوَّل المستوى:
from machine import ADC
import time
ain = ADC("P6")
while True:
v = ain.read_u16() * 3.3 / 65535
print("AIN:", v * (5.0 / 3.3), "V")
time.sleep_ms(100)
تفاعل مع حافة هابطة على خط SYN — على سبيل المثال، لمزامنة الكاميرا مع جهاز آخر يسحب SYN إلى المستوى المنخفض:
from machine import Pin
def on_sync(pin):
print("SYN falling edge")
syn = Pin("P10", Pin.IN)
syn.irq(on_sync, Pin.IRQ_FALLING)