درع التحريك والإمالة (Pan and Tilt Shield)¶
يمنح درع التحريك والإمالة (Pan and Tilt Shield) كاميرا OpenMV Cam ثلاث قنوات مؤازِرة مع منظّم خطي 5 فولت من نوع NCP1117 يغذّي كلاً من الكاميرا والمؤازرات من دخل بطارية واحد بجهد 6.5–18 فولت.

للاطلاع على ورقة البيانات الكاملة والصور ومعلومات الطلب، راجع صفحة منتج درع التحريك والإمالة.
أبرز الميزات¶
ثلاث قنوات مؤازِرة مستقلة
يتكدّس مع درع المؤازر (Servo Shield)
مخطط الدبابيس¶
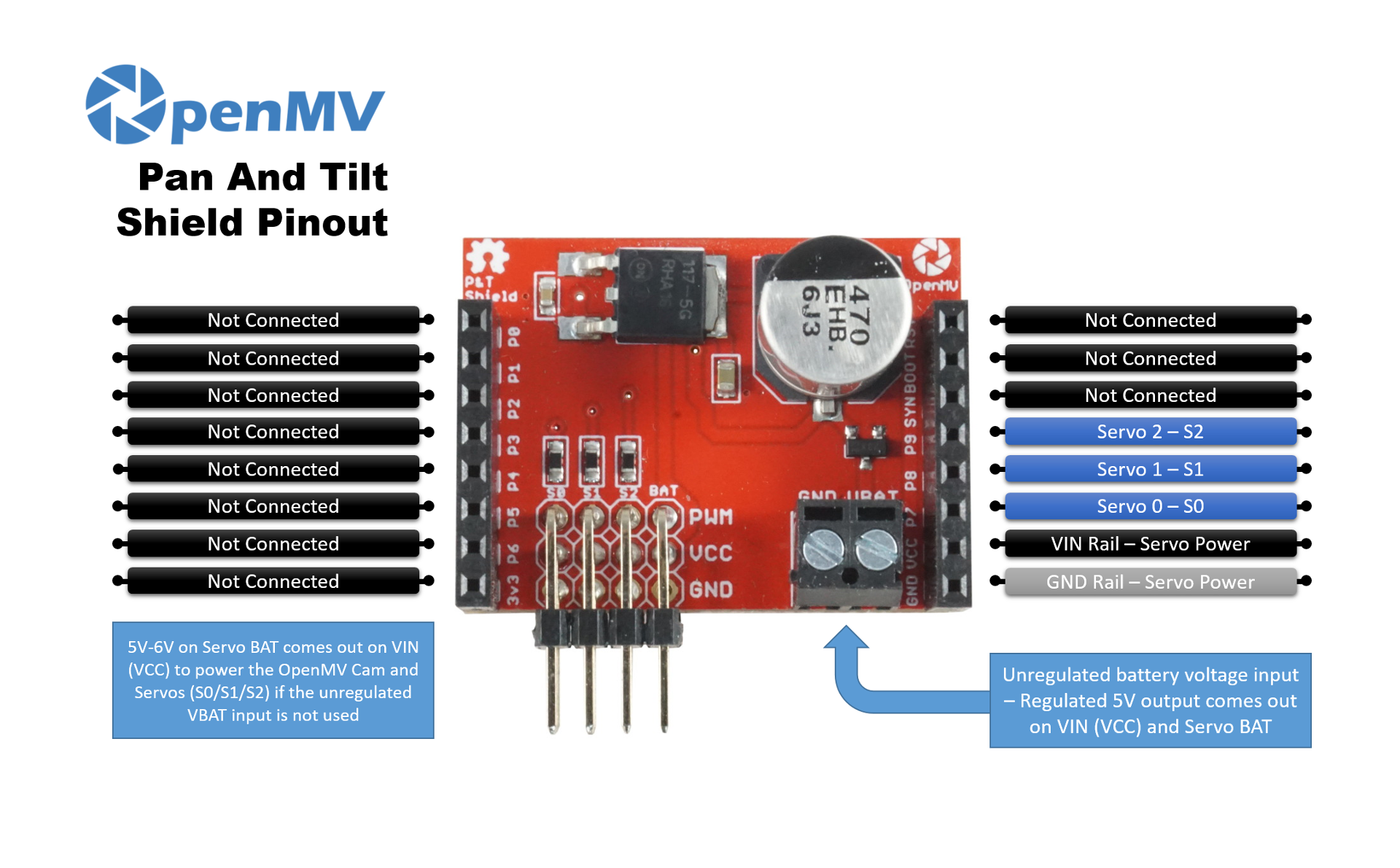
مرجع الدبابيس¶
الدبوس |
الوظيفة |
|---|---|
P7 |
المؤازر 0 (S0) |
P8 |
المؤازر 1 (S1) |
P9 |
المؤازر 2 (S2) |
دخل VBAT |
دخل بطارية 6.5–18 فولت على الطرف اللولبي (حدود NCP1117) |
خرج VIN |
5 فولت منظّمة من NCP1117 المدمج — يغذّي كلاً من الكاميرا وخط المؤازرات |
خط GND |
أرضي مشترك للمؤازر والكاميرا |
الاستخدام¶
شغّل قنوات المؤازرة الثلاث بإشارة PWM بتردد 50 هرتز. يختلف نطاق عرض النبضة بين المؤازرات، لذا اضبط MIN_US وMAX_US لتطابق ما لديك — القيم النموذجية تكون حوالي 1000–2000 ميكروثانية:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)