درع شاشة LCD اللمسية¶
يمنح درع شاشة LCD اللمسية كاميرا OpenMV Cam شاشة لمس متعددة سعوية مقاس 2.3 بوصة بدقة 320x240، بحيث يمكنك معاينة مخرجات الكاميرا (واستقبال الإدخال) دون الحاجة إلى حاسوب مضيف. يوفّر موصّلا Qwiic إمكانية ربط أجهزة I2C إضافية بسهولة.
للاطلاع على ورقة البيانات الكاملة والصور وطلب الشراء، راجع صفحة منتج درع شاشة LCD اللمسية.
أبرز الميزات¶
شاشة TFT LCD مقاس 2.3 بوصة، بدقة 320x240، بنظام ألوان 16 بت RGB565
إدخال لمس متعدد سعوي
إضاءة خلفية قابلة للتحكم عبر PWM
موصّلا Qwiic لربط أجهزة I2C بسهولة
مخطط الأطراف¶
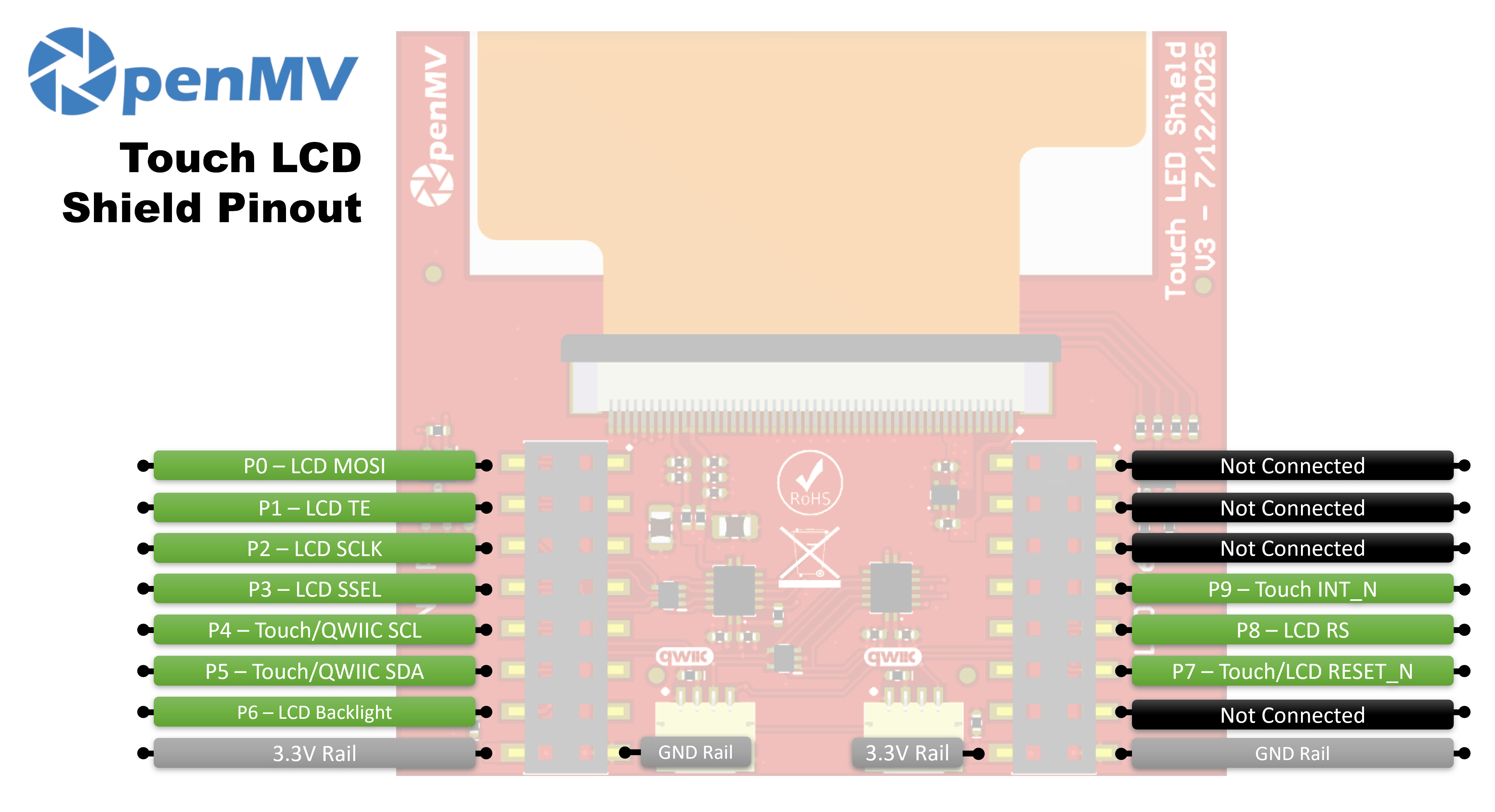
مرجع الأطراف¶
الطرف |
الوظيفة |
|---|---|
P0 |
LCD MOSI (بيانات SPI إلى الشاشة) |
P1 |
LCD TE (مخرج تأثير التمزق) |
P2 |
LCD SCLK (ساعة SPI) |
P3 |
LCD SSEL (تحديد شريحة SPI) |
P4 |
Touch / Qwiic SCL (ساعة I²C — مشتركة مع موصّلات Qwiic) |
P5 |
Touch / Qwiic SDA (بيانات I²C — مشتركة مع موصّلات Qwiic) |
P6 |
الإضاءة الخلفية للشاشة LCD |
P7 |
Touch / LCD RESET_N |
P8 |
LCD RS (تحديد البيانات / الأمر) |
P9 |
Touch INT_N |
خط الجهد 3.3V |
يغذّي وحدتي التحكم في الشاشة واللمس |
خط الأرضي GND |
الأرضي المشترك |
الاستخدام¶
شغّل الدرع عبر الفئة display.SPIDisplay. أرسل إطارات الكاميرا تدفقًا إلى شاشة LCD بدقة 320×240:
import csi
import time
import display
import image
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.QVGA)
lcd = display.SPIDisplay(width=320,
height=240,
bgr=True,
vflip=False,
hmirror=False)
clock = time.clock()
while True:
clock.tick()
lcd.write(csi0.snapshot(), hint=image.CENTER | image.SCALE_ASPECT_KEEP)
print(clock.fps())
تحكّم في الإضاءة الخلفية عبر PWM لضبط السطوع. غلّف machine.PWM داخل فئة صغيرة للتحكم في الإضاءة الخلفية ومرّرها إلى SPIDisplay عبر وسيطتها backlight — تستدعي SPIDisplay الدالة backlight(value) على الكائن كلما احتاجت إلى تحديث المستوى:
import csi
import time
import display
import image
from machine import Pin, PWM
class PWMBacklight:
"""Drives a backlight pin with machine.PWM (0–100 %)."""
def __init__(self, pin, frequency=200):
self._pwm = PWM(Pin(pin), freq=frequency, duty_u16=0)
def backlight(self, value):
self._pwm.duty_u16(int(value * 65535 / 100))
def deinit(self):
self._pwm.deinit()
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.QVGA)
lcd = display.SPIDisplay(width=320,
height=240,
bgr=True,
vflip=False,
hmirror=False,
backlight=PWMBacklight("P6"))
lcd.backlight(50) # 0–100
clock = time.clock()
while True:
clock.tick()
lcd.write(csi0.snapshot(), hint=image.CENTER | image.SCALE_ASPECT_KEEP)
print(clock.fps())
اقرأ إدخال اللمس المتعدد من وحدة التحكم السعوية FT6x36 المدمجة على اللوحة — وهي موصولة بناقل I²C الخاص بالكاميرا على P4/P5 مع إعادة التعيين على P7 والمقاطعة IRQ على P9. يجمع المثال أدناه بين اللمس وتدفق الكاميرا المباشر، حيث يرسم دائرة حمراء على الشاشة LCD أينما يُضغط بإصبع:
from time import sleep_ms
from array import array
from machine import Pin, SoftI2C
import csi
import display
import image
import time
_DEFAULT_ADDR = const(0x38)
_DEV_MODE = const(0x00)
_TD_STATUS = const(0x02)
class FT6X36:
FLAG_PRESSED = 0
FLAG_RELEASED = 1
FLAG_MOVED = 2
def __init__(
self,
bus,
reset_pin,
irq_pin,
address=_DEFAULT_ADDR,
width=320,
height=240,
reverse_x=False,
reverse_y=False,
touch_callback=None,
):
self.bus = bus
self.address = address
self.width = width
self.height = height
self.reverse_x = reverse_x
self.reverse_y = reverse_y
self.touch_callback = touch_callback
# reset_pin=None skips the reset pulse — useful when another
# peripheral on the same line (e.g. the LCD) has already done it.
if reset_pin is not None:
self.rst_pin = Pin(reset_pin, Pin.OUT_PP, value=0)
else:
self.rst_pin = None
self.irq_pin = None
self.irq_pin_label = irq_pin
# Reset the touch panel controller.
self.reset()
# Put the controller into normal operating mode.
self._write_reg(_DEV_MODE, 0x00)
# Scratch buffer for points (x, y, flag, id) — chip max 2.
self.points_data = [array("H", [0, 0, 0, 0]) for _ in range(2)]
self._touch_points_old = 0
self._touch_points = 0
def _read_reg(self, reg, size=1, buf=None):
# FT6X36 expects two separate START/STOP transactions
# (no repeated start), so don't use readfrom_mem here.
self.bus.writeto(self.address, bytes([reg]))
if buf is not None:
self.bus.readfrom_into(self.address, buf)
else:
return self.bus.readfrom(self.address, size)
def _write_reg(self, reg, val, size=1):
if size == 1:
buf = bytes([reg, val & 0xFF])
else:
buf = bytes([reg, val & 0xFF, val >> 8])
self.bus.writeto(self.address, buf)
def reset(self):
if self.irq_pin is not None:
self.irq_pin.irq(handler=None)
if self.rst_pin is not None:
self.rst_pin(0)
sleep_ms(1)
self.rst_pin(1)
sleep_ms(39)
self.irq_pin = Pin(self.irq_pin_label, Pin.IN, Pin.PULL_UP)
if self.touch_callback is not None:
self.irq_pin.irq(
handler=self.touch_callback,
trigger=Pin.IRQ_FALLING,
hard=False,
)
def read_points(self):
regs = self._read_reg(_TD_STATUS, 13)
n_points = min(regs[0] & 0x0F, 2)
for i in range(0, n_points):
base = 1 + i * 6
x = ((regs[base] & 0xF) << 8) | regs[base + 1]
y = ((regs[base + 2] & 0xF) << 8) | regs[base + 3]
if self.reverse_x:
x = self.width - 1 - x
if self.reverse_y:
y = self.height - 1 - y
self.points_data[i][0] = x
self.points_data[i][1] = y
self.points_data[i][2] = regs[base] >> 6
self.points_data[i][3] = regs[base + 2] >> 4
# Mark previously-active slots as released so the caller
# sees a release event after a finger lifts.
for i in range(n_points, 2):
self.points_data[i][2] = self.FLAG_RELEASED
# Latch touch count: rising immediate, falling debounced one read.
if n_points >= self._touch_points:
self._touch_points = n_points
elif n_points <= self._touch_points_old:
self._touch_points = self._touch_points_old
self._touch_points_old = n_points
return self._touch_points, self.points_data
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.QVGA)
lcd = display.SPIDisplay(width=320,
height=240,
bgr=True,
vflip=False,
hmirror=False)
# The LCD and touch controllers share P7 as a reset line. The LCD
# has already pulsed it during its own init, so init the touch
# controller after with reset_pin=None to skip a redundant pulse.
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"), freq=100_000)
touch = FT6X36(bus, reset_pin=None, irq_pin="P9", reverse_y=True)
clock = time.clock()
# Some sensors return less than 240 lines at QVGA (e.g. 320x200 on
# the N6). The display centers the frame, so map touch Y to image Y.
y_offset = (touch.height - csi0.height()) // 2
while True:
clock.tick()
img = csi0.snapshot()
n, points = touch.read_points()
for i in range(n):
x, y, flag, tid = points[i]
if flag != FT6X36.FLAG_RELEASED:
iy = y - y_offset
if 0 <= iy < csi0.height():
img.draw_circle(
(x, iy, 18), color=(255, 0, 0), thickness=2
)
lcd.write(img, hint=image.CENTER | image.SCALE_ASPECT_KEEP)
print(clock.fps())