درع RS422/RS485¶
يمنح درع RS422/RS485 كاميرا OpenMV Cam وصلة تسلسلية تفاضلية بعيدة المدى مناسبة للنواقل الصناعية، مع طاقة بدخل واسع وحماية من الارتفاعات المفاجئة ودخل/خرج ADC ورقمي.
للاطلاع على ورقة البيانات الكاملة والصور وطلب الشراء، راجع صفحة منتج درع RS422/RS485.
أبرز الميزات¶
RS-422 أو RS-485 بسرعة 10 ميجابت/ث مع إنهاء مدمج على اللوحة
دخل 6-36 فولت متحمّل لعكس الجهد
دخل ADC بمدى 0-5 فولت مع حماية من فرط الجهد بمقدار ±36 فولت
دخل/خرج رقمي بمدى 0-5 فولت لمحفّزات مزامنة الكاميرا، محميّ من القصر
مخطط الأطراف¶
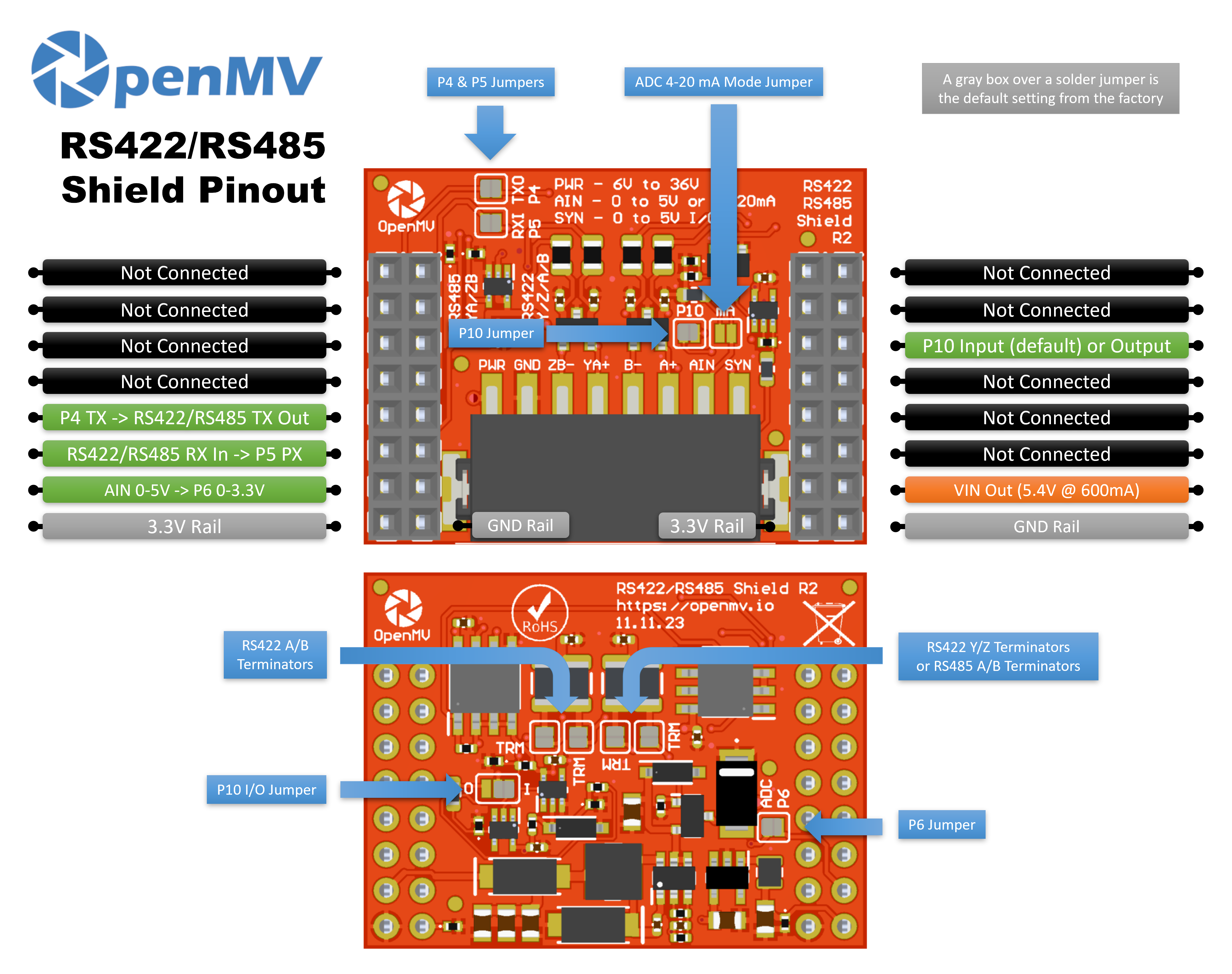
مرجع الأطراف¶
الطرف |
الوظيفة |
|---|---|
P4 |
RS-422 / RS-485 TX ← يقود الخط التفاضلي للخارج |
P5 |
RS-422 / RS-485 RX ← يستقبل الخط التفاضلي للداخل |
P6 |
قراءة AIN بعد تحويل المستوى (0–3.3 فولت على P6) |
P10 |
SYN — دخل/خرج رقمي مفتوح المصرف على كتلة الأطراف |
دخل PWR |
دخل واسع 6–36 فولت على كتلة الأطراف (متحمّل لعكس الجهد) |
دخل AIN |
دخل تماثلي على كتلة الأطراف |
خرج VIN |
5.4 فولت بتيار يصل إلى 600 ميلي أمبير من المنظّم المدمج على اللوحة |
خط 3.3V |
يغذّي إلكترونيات الدرع المدمجة على اللوحة |
خط GND |
أرضي مشترك |
ملاحظة
إن AIN محميّ من فرط الجهد حتى ±36 فولت وهو افتراضياً دخل جهد بمدى 0–5 فولت، يُخفَّض إلى 0–3.3 فولت على P6. صِل مَفصِل وضع 4–20 ميلي أمبير الموجود على واجهة الدرع لتحويل AIN إلى دخل حلقة تيار 4–20 ميلي أمبير.
ملاحظة
إن SYN خط رقمي مفتوح المصرف، مسحوب لأعلى إلى 3.3 فولت على جانب الكاميرا وإلى 5 فولت على جانب طرف SYN. وهو افتراضياً دخل — إذ يحوّل الدرع مستوى 0–5 فولت على SYN إلى 0–3.3 فولت على P10. غيّر وصلة اللَحم المدمجة على اللوحة لقلب P10 إلى خرج، بحيث يحوّل المستوى من 0–3.3 فولت على P10 إلى 0–5 فولت على SYN.
ملاحظة
كل من P4 و P5 و P6 و P10 موصول بالكاميرا افتراضياً عبر وصلة لَحم — افتح الوصلة على أي طرف تريد إعادة استخدامه لأغراض غير ذات صلة. تقع وصلة P6 على الجانب الخلفي من الدرع، بينما تقع وصلات P4 و P5 و P10 على الجانب الأمامي.
ملاحظة
إن مقاومات الإنهاء المدمجة على اللوحة موصولة افتراضياً — افتح وصلات اللَحم المقابلة على الجانب الخلفي لفصلها. وتغطي وصلتان زوج RS-422 A/B واثنتان تغطيان زوج RS-422 Y/Z (الذي يقوم أيضاً بدور إنهاء RS-485 A/B)، أي أربع وصلات في المجموع.
حول RS-422 و RS-485
يرسل كلا المعيارين البيانات التسلسلية كإشارة متوازنة (تفاضلية) عبر أزواج ملتوية للحصول على وصلات بعيدة المدى ومتحمّلة للضوضاء:
RS-422 مزدوج الاتجاه الكامل عبر أربعة أسلاك. يرسل المُشغّل على زوج إرسال TX مخصّص يُسمّى Y/Z، ويردّ الطرف النظير بالإرسال على زوج استقبال RX منفصل يُسمّى A/B. مُرسِل واحد وما يصل إلى عشرة مستقبِلات لكل زوج.
RS-485 عادةً ما يكون نصف مزدوج الاتجاه عبر سلكين. يتشارك الإرسال والاستقبال زوجاً واحداً يُسمّى A/B في مصطلحات RS-485 لكنه فيزيائياً نفس خطوط Y/Z على هذا الدرع. يمكن لما يصل إلى اثنتين وثلاثين عقدة أن تتشارك الناقل وأن يقوده أيٌّ منها.
كيف يدعم الدرع كلا المعيارين
يحمل الدرع جهازَي إرسال واستقبال THVD1426، كلٌّ منهما قادر على التعامل مع أيٍّ من المعيارين:
يقود جهاز الإرسال والاستقبال الأول زوج Y/Z (الذي يقوم أيضاً بدور زوج RS-485 A/B). وهو الوحيد الموصول مُشغّله، لذا فإن كل حركة المرور الصادرة من الكاميرا تخرج عبر هذا الزوج بصرف النظر عن الوضع.
يقود جهاز الإرسال والاستقبال الثاني زوج A/B. ومُشغّله معطّل — فهذا الجهاز للاستقبال فقط ولا يهمّ إلا في وضع RS-422 بأربعة أسلاك.
مستقبِلات كلا جهازَي الإرسال والاستقبال مفعّلة دائماً، وتُجمَع مخارج RX الخاصة بهما بعملية AND معاً على خط استقبال واحد عائد إلى الكاميرا:
في وضع RS-485 بسلكين، يكون جهاز الإرسال والاستقبال الأول وحده نشطاً. صِل الناقل بـ Y/Z؛ يبقى جانب A/B خاملاً وتمرّر بوابة AND ببساطة RX الخاص بجهاز الإرسال والاستقبال الأول.
في وضع RS-422 بأربعة أسلاك، يرسل الطرف النظير إلى الكاميرا على زوج A/B (يلتقطه جهاز الإرسال والاستقبال الثاني) بينما ترسل الكاميرا على Y/Z (مع قيام مستقبِل جهاز الإرسال والاستقبال الأول بإرجاع صدى لبياناتها الصادرة). تجمع بوابة AND بينهما — فأيّ زوج يرى نبضة منخفضة (بِت البدء، البيانات) يصل إلى الكاميرا.
تعكس تسميات كتلة الأطراف الربط المزدوج:
RS-422 (أربعة أسلاك) — خرج TX على Y/Z، ودخل RX على A/B.
RS-485 (سلكان) — يتشارك TX/RX زوج Y/Z (= A/B في تسمية RS-485). اترك طرفي A/B على الدرع دون توصيل.
الاستخدام¶
ملاحظة
يتبع رقم الطرفية UART(3) أدناه ربط STM32. وعلى معالج آخر قد يكون الناقل الموصول بهذه الأطراف مختلفاً — راجع مرجع لوحتك.
تواصل مع طرف تسلسلي تفاضلي نظير على P4 (TX) / P5 (RX):
from machine import UART
uart = UART(3, baudrate=115200)
uart.write("hello\n")
print(uart.read())
اقرأ دخل كتلة أطراف AIN عبر طرف P6 بعد تحويل المستوى:
from machine import ADC
import time
ain = ADC("P6")
while True:
v = ain.read_u16() * 3.3 / 65535
print("AIN:", v * (5.0 / 3.3), "V")
time.sleep_ms(100)
تجاوب مع حافة هابطة على خط SYN — على سبيل المثال، لمزامنة الكاميرا مع جهاز آخر يسحب SYN لأسفل:
from machine import Pin
def on_sync(pin):
print("SYN falling edge")
syn = Pin("P10", Pin.IN)
syn.irq(on_sync, Pin.IRQ_FALLING)