درع المؤازر¶
يقود درع المؤازر ما يصل إلى ثمانية مؤازرات هواة بالتوازي من كاميرا OpenMV Cam عبر I2C، باستخدام متحكّم مؤازر/PWM من نوع PCA9685.
للاطلاع على ورقة البيانات الكاملة والصور وطلب الشراء، راجع صفحة منتج درع المؤازر.
أبرز الميزات¶
متحكّم مؤازر/PWM من نوع PCA9685
ثماني قنوات مؤازر مستقلة عبر I2C
قابل للتكديس مع درع المحرك ودرع الدوران والميل
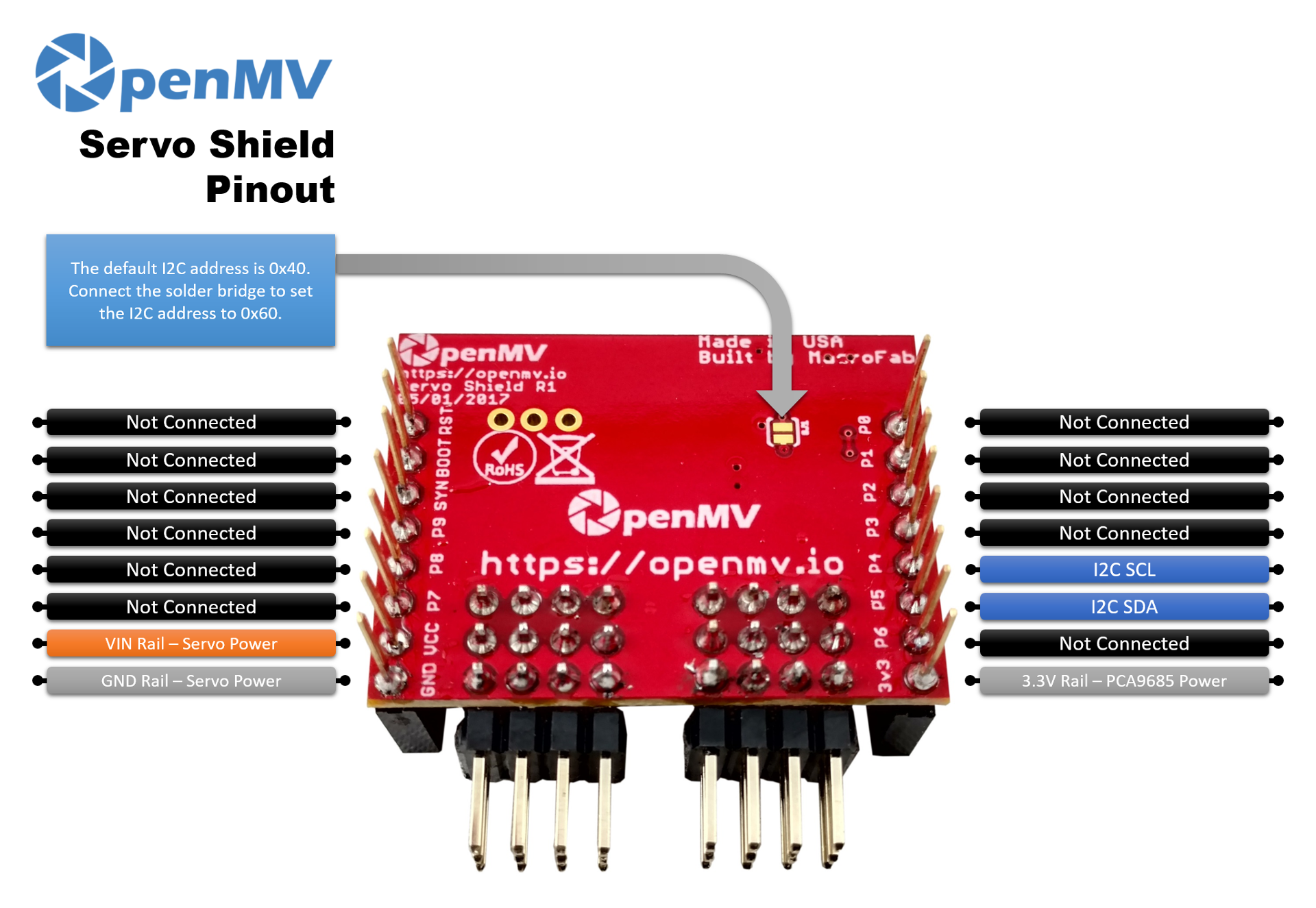
مخطط الأطراف¶
مرجع الأطراف¶
الطرف |
الوظيفة |
|---|---|
P4 |
I²C SCL — ساعة إلى PCA9685 |
P5 |
I²C SDA — بيانات إلى PCA9685 |
خط VIN |
يغذّي المؤازرات (من طرف VIN الخاص بالكاميرا) |
خط 3.3V |
يغذّي منطق PCA9685 |
خط GND |
أرضي مشترك للمؤازر والكاميرا |
عنوان I²C الافتراضي هو 0x40. صِل وصلة اللَحم المدمجة على اللوحة لنقل العنوان إلى 0x60.
ملاحظة
يسحب الدرع طاقة المؤازر مباشرة من طرف VIN الخاص بالكاميرا. لا يغذّي USB طرف VIN على أي كاميرا OpenMV Cam، لذا يجب توفير VIN خارجياً (بطارية أو مصدر مختبري أو ما شابه) — اختر مصدراً مصنّفاً لتيار التوقف المجمّع لكل مؤازر تخطط لقيادته.
الاستخدام¶
قُد قنوات المؤازر الثمانية عبر PCA9685 من خلال I²C. يختلف مدى عرض النبضة بين المؤازرات، لذا اضبط MIN_US و MAX_US لمطابقة مؤازراتك — القيم النموذجية تقع حول 1000–2000 ميكروثانية:
import time
from machine import SoftI2C, Pin
class PCA9685:
"""Minimal PCA9685 driver — 12-bit PWM on any of 8 channels."""
def __init__(self, bus, address=0x40, freq=50):
self._bus = bus
self._addr = address
bus.writeto_mem(address, 0x00, b"\x00") # reset Mode1
prescale = round(25_000_000 / (4096 * freq)) - 1
bus.writeto_mem(address, 0x00, b"\x10") # sleep
bus.writeto_mem(address, 0xFE, bytes([prescale])) # prescale
bus.writeto_mem(address, 0x00, b"\x00") # wake
time.sleep_us(5)
bus.writeto_mem(address, 0x00, b"\xA1") # restart + AI + allcall
self._period_us = 1_000_000 // freq
def set_duty(self, channel, duty):
duty &= 0xFFF # 12-bit
if duty == 0:
on, off = 0, 0x1000 # FULL_OFF
elif duty == 0xFFF:
on, off = 0x1000, 0 # FULL_ON
else:
on, off = 0, duty
self._bus.writeto_mem(
self._addr, 0x06 + 4 * channel,
bytes([on & 0xFF, on >> 8, off & 0xFF, off >> 8]))
def set_us(self, channel, pulse_us):
self.set_duty(channel, (pulse_us * 4096) // self._period_us)
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=50)
def angle(channel, deg):
pca.set_us(channel, MIN_US + (deg * (MAX_US - MIN_US)) // 180)
while True:
for ch in range(8):
angle(ch, 0)
time.sleep_ms(2000)
for ch in range(8):
angle(ch, 180)
time.sleep_ms(2000)
يتعامل PCA9685 أيضاً مع PWM عام بدقة 12 بِت عند أي تردد — أعِد استخدام الصنف نفسه مع set_duty (0–4095) لتقوم، على سبيل المثال، بتعتيم مؤشر LED على القناة 0 بتردد 1 كيلوهرتز. تقوم الدالة المساعدة أدناه بمعايرة قيمة عشرية بمدى 0.0–100.0% على مدى دورة العمل 0–4095 الخاص بالرقاقة:
import time
from machine import SoftI2C, Pin
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=1000)
def brightness(channel, pct):
pca.set_duty(channel, int(pct * 4095 / 100))
while True:
# Ramp up 0 → 100%.
for pct in range(101):
brightness(0, float(pct))
time.sleep_ms(20)
# Ramp down 100 → 0%.
for pct in reversed(range(101)):
brightness(0, float(pct))
time.sleep_ms(20)