Servo Shield¶
ה-Servo Shield מניע עד שמונה מנועי הגה (servo) של חובבים במקביל מתוך ה-OpenMV Cam דרך I2C, באמצעות בקר servo / PWM מסוג PCA9685.
ל-datasheet המלא, תמונות והזמנה ראו את עמוד המוצר של Servo Shield.
עיקרי הדברים¶
בקר servo / PWM מסוג PCA9685
שמונה ערוצי servo עצמאיים דרך I2C
ניתן להערים יחד עם ה-Motor Shield וה-Pan and Tilt Shield
Pinout¶
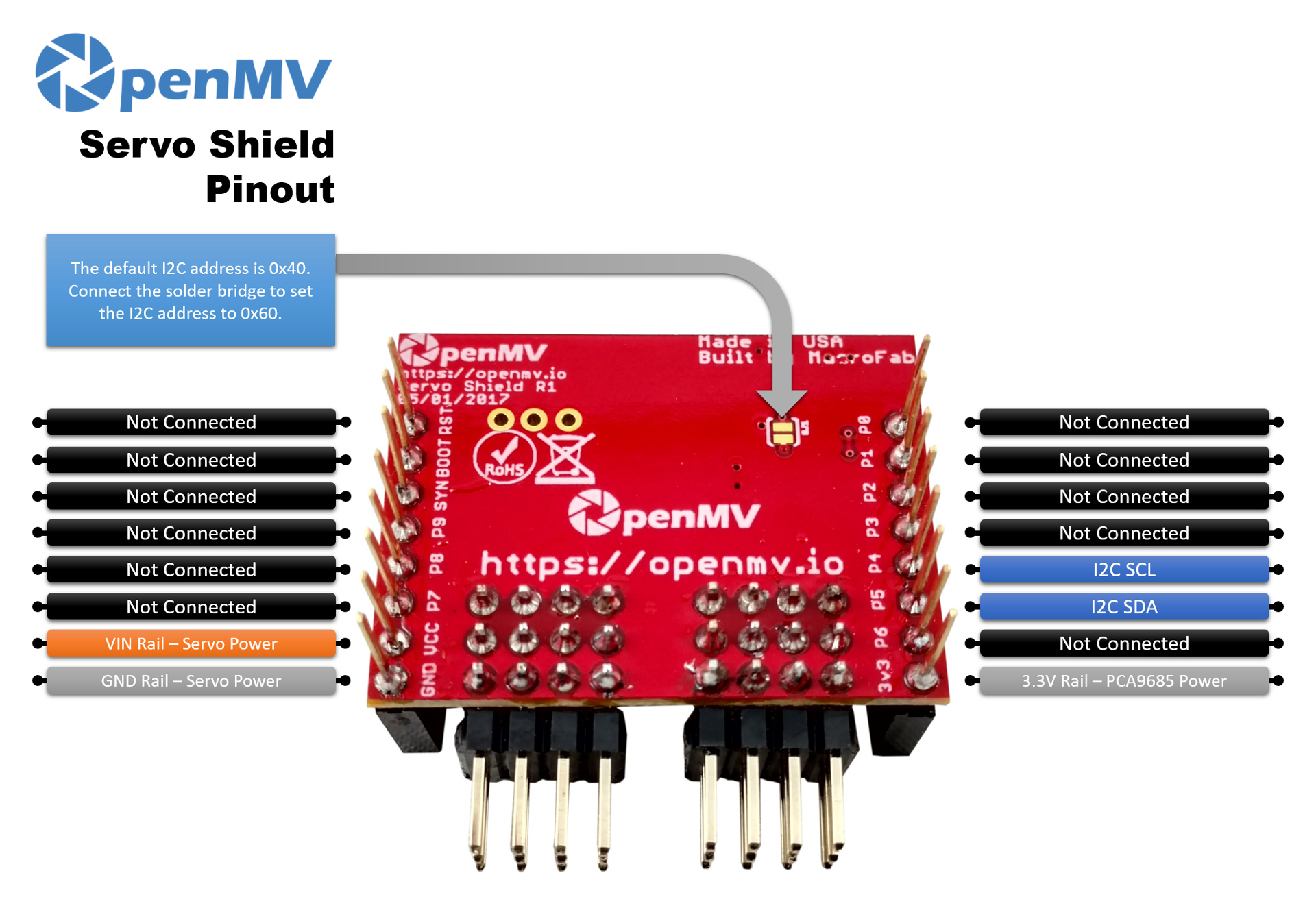
טבלת פינים¶
פין |
תפקיד |
|---|---|
P4 |
I²C SCL — שעון אל ה-PCA9685 |
P5 |
I²C SDA — נתונים אל ה-PCA9685 |
מסילת VIN |
מזין את מנועי ההגה (מפין ה-VIN של המצלמה) |
מסילת 3.3V |
מזין את הלוגיקה של ה-PCA9685 |
מסילת GND |
הארקה משותפת של ה-servo והמצלמה |
כתובת ה-I²C ברירת המחדל היא 0x40. חברו את גשר ההלחמה המובנה כדי להעביר את הכתובת אל 0x60.
הערה
ה-shield שואב את הזנת ה-servo ישירות מפין ה-VIN של המצלמה. USB אינו מזין את VIN באף OpenMV Cam, ולכן יש לספק את VIN חיצונית (סוללה, ספק שולחני או דומה) — בחרו מקור המדורג לזרם העצירה (stall) המשולב של כל מנוע הגה שבכוונתכם להניע.
שימוש¶
הניעו את שמונת ערוצי ה-servo דרך ה-PCA9685 על I²C. טווח רוחב-הדופק משתנה בין מנועי הגה, לכן כווננו את MIN_US ו-MAX_US כך שיתאימו לשלכם — ערכים אופייניים נעים סביב 1000–2000 µs:
import time
from machine import SoftI2C, Pin
class PCA9685:
"""Minimal PCA9685 driver — 12-bit PWM on any of 8 channels."""
def __init__(self, bus, address=0x40, freq=50):
self._bus = bus
self._addr = address
bus.writeto_mem(address, 0x00, b"\x00") # reset Mode1
prescale = round(25_000_000 / (4096 * freq)) - 1
bus.writeto_mem(address, 0x00, b"\x10") # sleep
bus.writeto_mem(address, 0xFE, bytes([prescale])) # prescale
bus.writeto_mem(address, 0x00, b"\x00") # wake
time.sleep_us(5)
bus.writeto_mem(address, 0x00, b"\xA1") # restart + AI + allcall
self._period_us = 1_000_000 // freq
def set_duty(self, channel, duty):
duty &= 0xFFF # 12-bit
if duty == 0:
on, off = 0, 0x1000 # FULL_OFF
elif duty == 0xFFF:
on, off = 0x1000, 0 # FULL_ON
else:
on, off = 0, duty
self._bus.writeto_mem(
self._addr, 0x06 + 4 * channel,
bytes([on & 0xFF, on >> 8, off & 0xFF, off >> 8]))
def set_us(self, channel, pulse_us):
self.set_duty(channel, (pulse_us * 4096) // self._period_us)
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=50)
def angle(channel, deg):
pca.set_us(channel, MIN_US + (deg * (MAX_US - MIN_US)) // 180)
while True:
for ch in range(8):
angle(ch, 0)
time.sleep_ms(2000)
for ch in range(8):
angle(ch, 180)
time.sleep_ms(2000)
ה-PCA9685 מטפל גם ב-PWM כללי של 12 סיביות בכל תדר — השתמשו שוב באותה מחלקה עם set_duty (0–4095) כדי, למשל, לעמעם LED בערוץ 0 בתדר 1 kHz. הפונקציה המסייעת למטה ממירה מספר עשרוני של 0.0–100.0% אל טווח ה-duty של השבב 0–4095:
import time
from machine import SoftI2C, Pin
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=1000)
def brightness(channel, pct):
pca.set_duty(channel, int(pct * 4095 / 100))
while True:
# Ramp up 0 → 100%.
for pct in range(101):
brightness(0, float(pct))
time.sleep_ms(20)
# Ramp down 100 → 0%.
for pct in reversed(range(101)):
brightness(0, float(pct))
time.sleep_ms(20)