Relay Shield¶
ה-Relay Shield מתג שני עומסי AC או DC בהספק גבוה של עד 60 W לכל ממסר מתוך ה-OpenMV Cam, עם כניסת 6-36 V בתוספת כניסת ADC וקו I/O דיגיטלי לסנכרון.
ל-datasheet המלא, תמונות והזמנה ראו את עמוד המוצר של Relay Shield.
עיקרי הדברים¶
ממסרים כפולים — 60 W כל אחד (15-220 V DC, 125-260 V AC)
כניסת 6-36 V עם עמידות למתח הפוך
כניסת ADC של 0-5 V עם הגנת מתח-יתר של ±36 V
I/O דיגיטלי של 0-5 V להדקי סנכרון מצלמה
Pinout¶
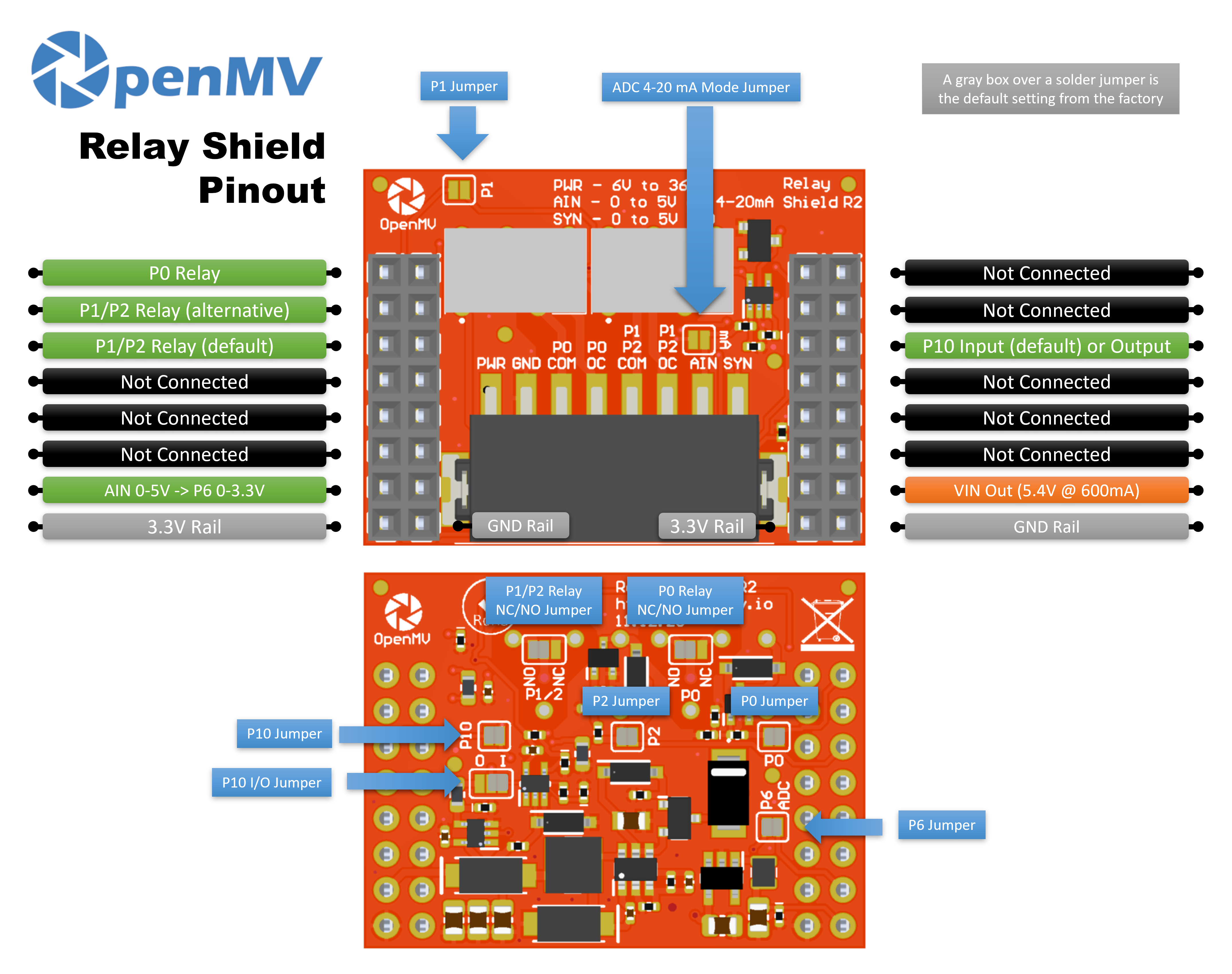
טבלת פינים¶
פין |
תפקיד |
|---|---|
P0 |
בקרת ממסר 1 |
P1 |
בקרת ממסר 2 (חלופי) |
P2 |
בקרת ממסר 2 (ברירת מחדל) |
P6 |
קריאת AIN מוסטת-מתח (0–3.3 V על P6) |
P10 |
SYN — I/O דיגיטלי open-drain על בלוק ההדקים |
PWR in |
כניסת רוחב 6–36 V על בלוק ההדקים (עמידה למתח הפוך) |
AIN in |
כניסה אנלוגית על בלוק ההדקים |
VIN out |
5.4 V בזרם של עד 600 mA מהמייצב המובנה |
מסילת 3.3V |
מזין את האלקטרוניקה המובנית של ה-shield |
מסילת GND |
הארקה משותפת |
הערה
AIN מוגן מפני מתח-יתר עד ±36 V וברירת המחדל שלו היא כניסת מתח של 0–5 V, מוקטנת ל-0–3.3 V על P6. גשרו את שאנט מצב 4–20 mA בחזית ה-shield כדי להחליף את AIN לכניסת לולאת-זרם 4–20 mA.
הערה
SYN הוא קו דיגיטלי open-drain, מושך אל 3.3 V בצד המצלמה ואל 5 V בצד הדק ה-SYN. כברירת מחדל הוא כניסה — ה-shield מסיט את 0–5 V על SYN אל 0–3.3 V על P10. שנו את גשר ההלחמה המובנה כדי להפוך את P10 ליציאה, תוך הסטת 0–3.3 V על P10 אל 0–5 V על SYN.
הערה
כל אחד מ-P0, P1, P2, P6 ו-P10 ניתן להחזיר לשימוש בלתי-קשור. P0, P2, P6 ו-P10 מחוברים כברירת מחדל דרך גשרי הלחמה בצד האחורי — פתחו את הגשר על כל פין שברצונכם לשחרר. P1 ברירת המחדל שלו מנותקת: גשרו את גשרו בצד הקדמי כדי לנתב את ממסר 2 אל P1 במקום זאת (ופתחו את גשר הצד האחורי של P2 כדי לשחרר את P2).
הערה
ברירת המחדל של הממסרים היא מצב פתוח רגיל (NO). גשרי הלחמה בתחתית ה-shield מחליפים אותם למצב סגור רגיל (NC).
שימוש¶
החליפו את מצב שני הממסרים מ-P0 ו-P1:
from machine import Pin
import time
relay1 = Pin("P0", Pin.OUT)
relay2 = Pin("P1", Pin.OUT)
while True:
relay1.on()
relay2.off()
time.sleep(1)
relay1.off()
relay2.on()
time.sleep(1)
קראו את כניסת בלוק ההדקים AIN דרך הפין המוסט P6:
from machine import ADC
import time
ain = ADC("P6")
while True:
v = ain.read_u16() * 3.3 / 65535
print("AIN:", v * (5.0 / 3.3), "V")
time.sleep_ms(100)
הגיבו לקצה יורד על קו ה-SYN — למשל, כדי לסנכרן את המצלמה עם התקן אחר המושך את SYN למצב נמוך:
from machine import Pin
def on_sync(pin):
print("SYN falling edge")
syn = Pin("P10", Pin.IN)
syn.irq(on_sync, Pin.IRQ_FALLING)