CAN/RS232 Shield¶
ה‑CAN/RS232 Shield משלב משדר‑מקלט CAN-FD עם משדר‑מקלט RS-232 כך שמצלמת ה‑OpenMV Cam יכולה לתקשר עם רכבים, בקרים וציוד טורי ישן ממגן יחיד, עם הזנת קלט רחבה והגנה מפני מתח הפוך.
ל‑datasheet המלא, תמונות ופרטי הזמנה ראו את עמוד המוצר של CAN/RS232 Shield.
עיקרי הדברים¶
CAN-FD של 8 Mb/s עם סיום וסינון על הלוח
RS-232 של 1 Mb/s עם סינון משולב
קלט 6-36 V, סובלני למתח הפוך
קלט ADC של 0-5 V עם הגנת מתח יתר של ±36 V
קלט/פלט דיגיטלי של 0-5 V לטריגרים של סנכרון מצלמה, מוגן מפני קצר
מפת פינים¶
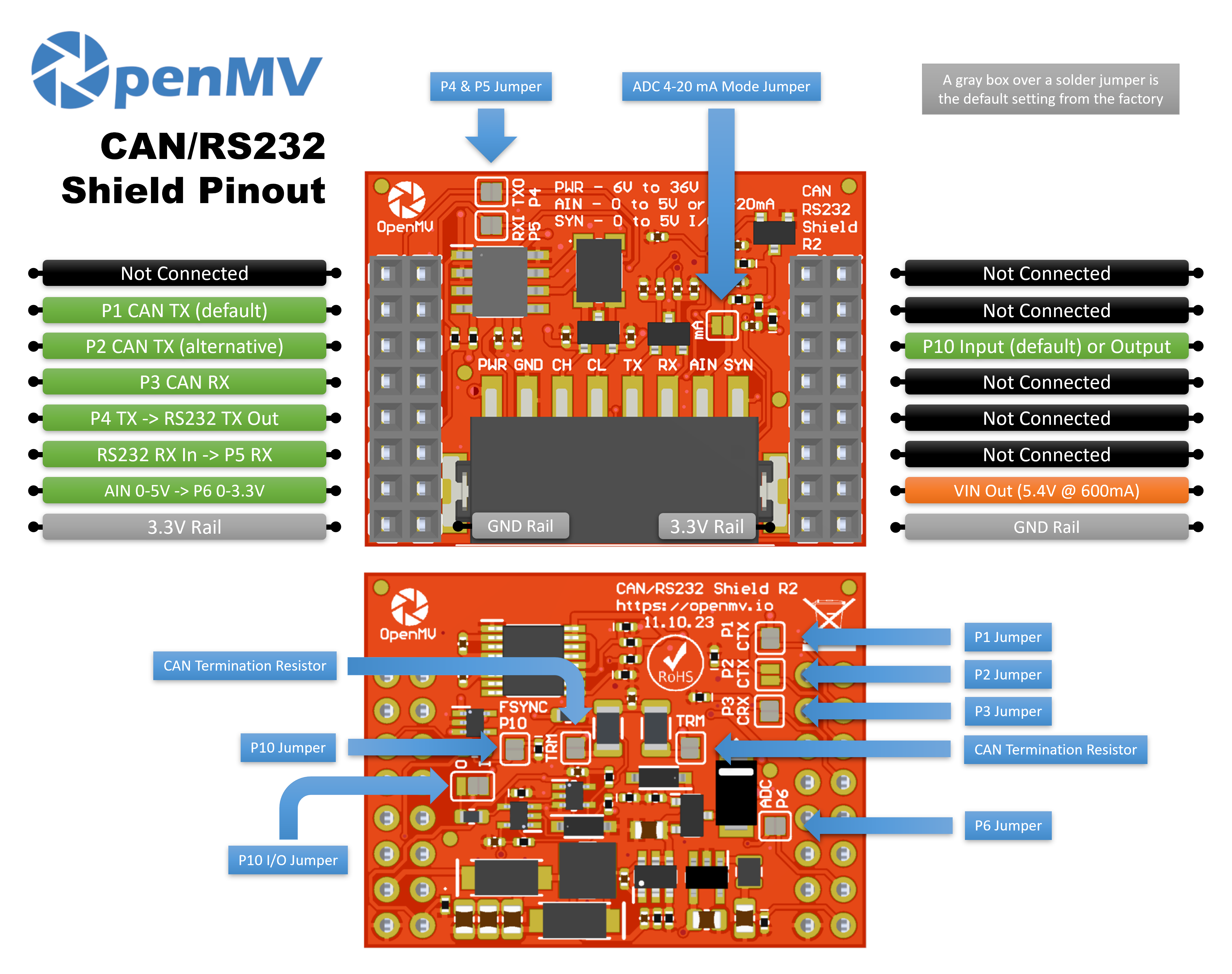
מדריך פינים¶
פין |
פונקציה |
|---|---|
P1 |
CAN TX → כניסת המשדר‑מקלט (ברירת מחדל) |
P2 |
CAN TX → כניסת המשדר‑מקלט (חלופי) |
P3 |
CAN RX ← יציאת המשדר‑מקלט |
P4 |
RS-232 TX → מניע את היציאה אל הקו |
P5 |
RS-232 RX ← מקבל את הכניסה מהקו |
P6 |
קריאת AIN חוזרת בהסטת מפלס (0–3.3 V על P6) |
P10 |
SYN — קלט/פלט דיגיטלי open-drain על מהדק החיבורים |
PWR in |
קלט רחב של 6–36 V על מהדק החיבורים (סובלני למתח הפוך) |
AIN in |
קלט אנלוגי על מהדק החיבורים |
VIN out |
5.4 V עד 600 mA מהמייצב שעל הלוח |
פס 3.3V |
מזין את האלקטרוניקה שעל הלוח של המגן |
פס GND |
הארקה משותפת |
הערה
AIN מוגן מפני מתח יתר עד ±36 V וכברירת מחדל הוא קלט מתח של 0–5 V, מוקטן ל‑0–3.3 V על P6. גשרו את shunt מצב 4–20 mA בחזית המגן כדי להחליף את AIN לקלט לולאת זרם של 4–20 mA.
הערה
SYN הוא קו דיגיטלי open-drain, מורם ל‑3.3 V בצד המצלמה ול‑5 V בצד מהדק SYN. כברירת מחדל הוא קלט — המגן מסיט 0–5 V על SYN מטה ל‑0–3.3 V על P10. שנו את גשר ההלחמה שעל הלוח כדי להפוך את P10 לפלט, בהסטת 0–3.3 V על P10 מעלה ל‑0–5 V על SYN.
הערה
כל אחד מ‑P1, P2, P3, P4, P5, P6 ו‑P10 יכול להיתפס מחדש לשימוש שאינו קשור. P1, P3, P4, P5, P6 ו‑P10 מחוברים כברירת מחדל — P1, P3, P6 ו‑P10 דרך גשרי הלחמה בצד האחורי, P4 ו‑P5 דרך גשרי הלחמה בצד הקדמי. פתחו את הגשר על כל פין שאתם רוצים לשחרר. P2 מנותק כברירת מחדל: גשרו את הגשר האחורי שלו כדי לנתב את CAN TX אל P2 במקום (ופתחו את הגשר האחורי של P1 כדי לשחרר את P1).
הערה
פיצול P1/P2 קיים כדי שהמגן יעבוד על פני משפחות מעבדים. לוחות OpenMV Cam IMXRT (RT1062) יכולים לנתב את CAN אל P1, ולכן הם משתמשים במיפוי ברירת המחדל. לוחות STM32 אינם יכולים להגיע אל P1 עם התקן ה‑CAN שלהם, ולכן גשרו את הגשר האחורי של P2 (ופתחו את זה של P1) כדי להשתמש בחלופי.
הערה
סיום אפיק ה‑CAN מחובר כברירת מחדל — מפוצל לשני חצאי 60 Ω בטור בין CANH ל‑CANL עם קבל להארקה בנקודת האמצע (סיום מפוצל מצומד‑AC של 120 Ω). פתחו את שתי רפידות ההלחמה כדי לנתק כל חצי באופן עצמאי.
שימוש¶
הערה
מספרי ההתקנים CAN(0) ו‑UART(1) שלהלן עוקבים אחר מיפוי IMXRT (חיווט P1 ברירת מחדל). על מעבד אחר האפיק המחווט לפינים אלו עשוי להיות שונה — בדקו את מדריך הלוח שלכם.
שלחו וקבלו פריימים של CAN-FD — TX על P1 (ברירת מחדל) או P2 (חלופי), RX על P3:
from machine import CAN
can = CAN(2, 1_000_000)
can.set_filters(None)
can.send(0x123, b"\xDE\xAD\xBE\xEF")
print(can.recv())
החזירו בתים בהד דרך RS-232 על P4 (TX) / P5 (RX):
from machine import UART
uart = UART(1, baudrate=115200)
uart.write("hello\n")
print(uart.read())
קראו את קלט מהדק החיבורים AIN דרך פין P6 המוסט במפלס:
from machine import ADC
import time
ain = ADC("P6")
while True:
v = ain.read_u16() * 3.3 / 65535
print("AIN:", v * (5.0 / 3.3), "V")
time.sleep_ms(100)
הגיבו לקצה יורד על קו SYN — לדוגמה, כדי לסנכרן את המצלמה עם התקן אחר שמושך את SYN לנמוך:
from machine import Pin
def on_sync(pin):
print("SYN falling edge")
syn = Pin("P10", Pin.IN)
syn.irq(on_sync, Pin.IRQ_FALLING)