Pan and Tilt Shield¶
ה-Pan and Tilt Shield מעניק ל-OpenMV Cam שלושה ערוצי סרוו עם מסדיר מתח ליניארי של 5 V מסוג NCP1117 המפעיל הן את המצלמה והן את הסרוו מכניסת סוללה יחידה של 6.5–18 V.

לקבלת גיליון נתונים מלא, תמונות ופרטי הזמנה ראו את דף המוצר של Pan and Tilt Shield.
עיקרים¶
שלושה ערוצי סרוו עצמאיים
ניתן לערום עם Servo Shield
מערך פינים¶
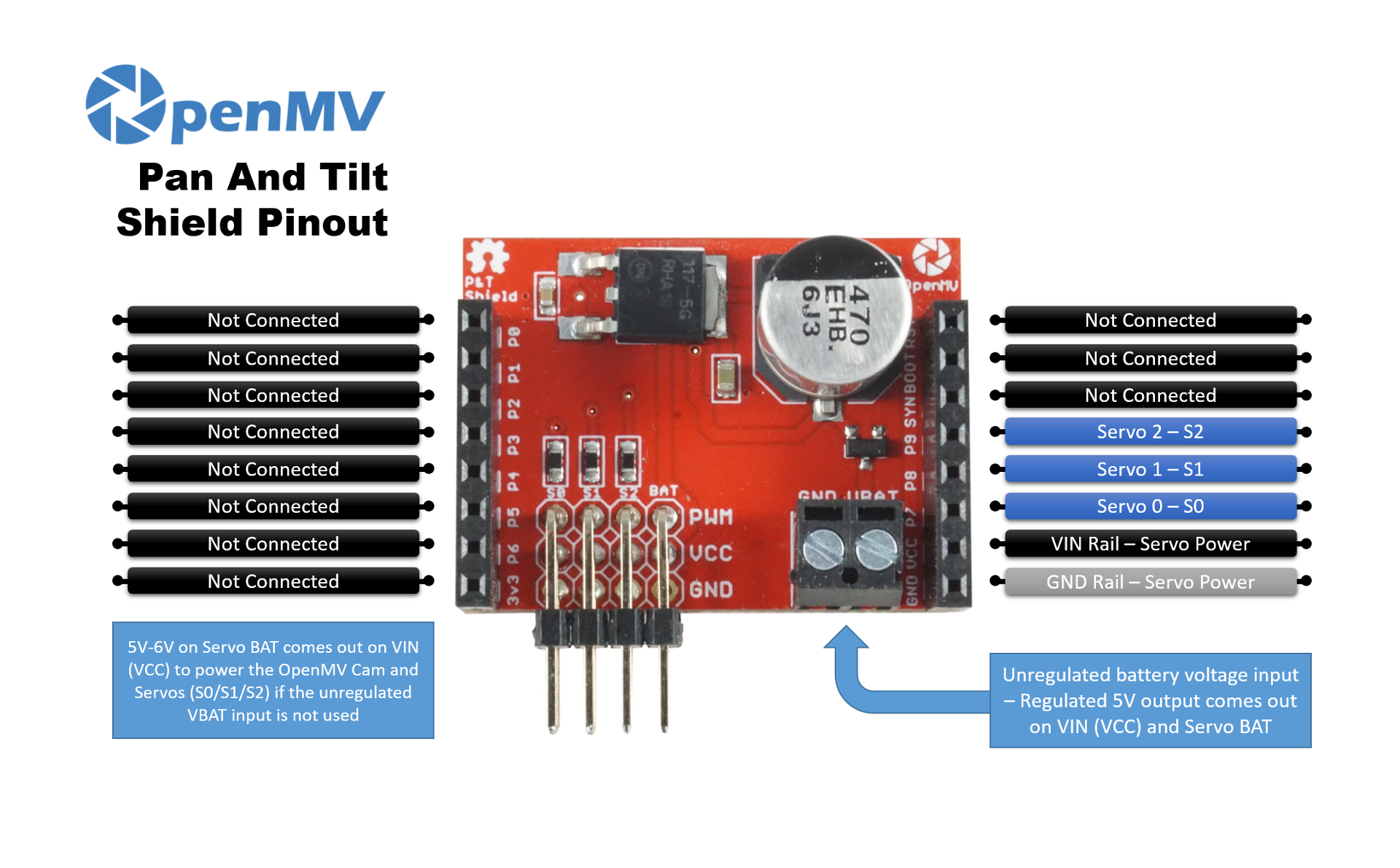
סימוכין פינים¶
פין |
תפקיד |
|---|---|
P7 |
Servo 0 (S0) |
P8 |
Servo 1 (S1) |
P9 |
Servo 2 (S2) |
VBAT in |
כניסת סוללה של 6.5–18 V על מסוף הברגים (מגבלות NCP1117) |
VIN out |
5 V מוסדר מה-NCP1117 שעל הלוח — מפעיל הן את המצלמה והן את פס הסרוו |
פס GND |
הארקה משותפת לסרוו ולמצלמה |
שימוש¶
הפעילו את שלושת ערוצי הסרוו עם PWM בתדר 50 Hz. טווח רוחב הפולס משתנה בין סרוו לסרוו, לכן כווננו את MIN_US ו-MAX_US כך שיתאימו לשלכם — ערכים אופייניים הם בסביבות 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)