13.1.7. Histogrammi¶
Kehyspuskurin katselimen alapuolella histogrammiruutu piirtää pikseliarvojen jakauman nykyisessä kehyksessä – tai, kun kehyspuskurissa on valittu alue, pelkästään kyseisessä alueessa. Se päivittyy reaaliaikaisesti esikatselun mukana, mikä tekee siitä työkalun konenäkötyössä jatkuvasti esiin nouseviin kysymyksiin: mikä väri tuo kohde on numeerisesti, kuinka paljon se vaihtelee ja kuinka se erottuu taustasta.
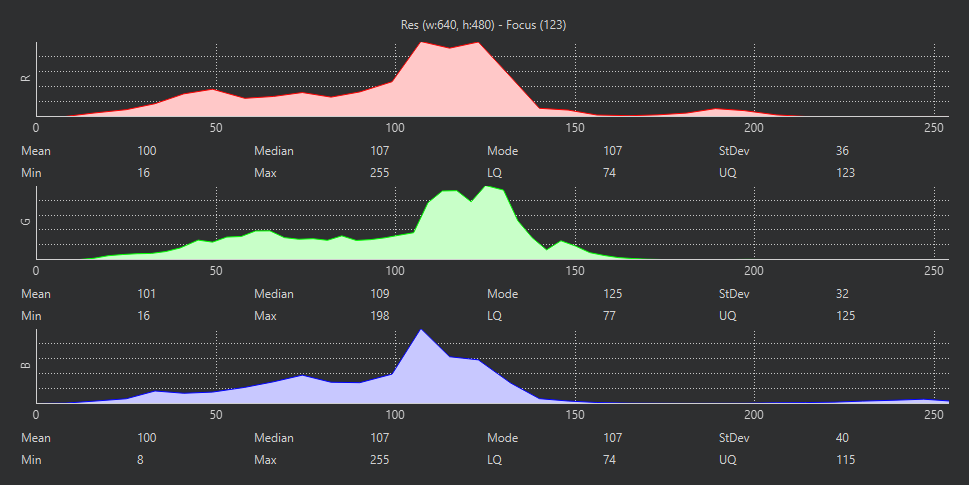
Histogrammi RGB-tilassa: yksi käyrä kullekin kanavalle ja sen tilastot alapuolella. Ylhäällä oleva lukemarivi päättyy tarkennuslukuun.¶
Ruudun otsikkopalkissa oleva valitsin valitsee väriavaruuden, jossa tilastot lasketaan: RGB, Grayscale, LAB tai YUV. Sovita se siihen, mitä skriptisi käyttää. Skripti, joka seuraa värillisiä blobeja menetelmällä find_blobs() käyttäen kynnysarvoja LAB-avaruudessa, joten lue kohteen arvot LAB-avaruudessa; skripti, joka käyttää kirkkauden kynnystystä, toimii harmaasävyssä. Jokainen kanava saa oman käyränsä, ja kanavan tilastot ovat alapuolella: keskiarvo, mediaani, moodi, keskihajonta, minimi, maksimi sekä ala- ja yläkvartiili.
Jokapäiväinen käyttö on kynnysarvojen etsintä. Valitse kohdekohde kehyspuskurissa, vaihda vastaavaan väriavaruuteen ja lue, missä sen pikselit todella sijaitsevat – kunkin kanavan min / max ovat ensimmäinen luonnos kynnysarvomonikosta, ja kvartiilit näyttävät, missä suurin osa jakaumasta on, kun ääriarvot ovat poikkeavia. Kynnysarvoeditori rakentuu samalle datalle interaktiivisesti.
13.1.7.1. Tarkennusluku¶
Histogrammin yläpuolella oleva lukemarivi päättyy tarkennusmittariin – kuvasta laskettuun terävyyspisteytykseen. Sen absoluuttinen arvo ei merkitse mitään; sen suunta merkitsee kaikkea. Linssiä säätäessäsi tarkkaile lukua: se nousee kuvan terävöityessä ja saavuttaa huippunsa parhaassa tarkennuksessa. Suuntaa kamera yksityiskohtaiseen kohteeseen työetäisyydellä, käännä linssiä hitaasti ja pysähdy maksimiin.