13.7.5. פריסה אל המצלמה¶
המודל המאומן שוכן בשרתים של Roboflow. העברתו אל המצלמה דורשת הורדה אחת, ואז את אותם השלבים כמו בטעינת כל מודל אחר.
13.7.5.1. הורדת המשקלים¶
בעמוד Deployments, בחרו Deploy to 3rd Party Platforms ובחרו בכרטיסייה OpenMV. היא מורידה את משקלי המודל כקובץ .tflite יחיד מכומת לערכים שלמים, ששמו על שם הפרויקט והגרסה – פורמט ה-int8 שמנוע ה-TFLite של המצלמה מריץ.
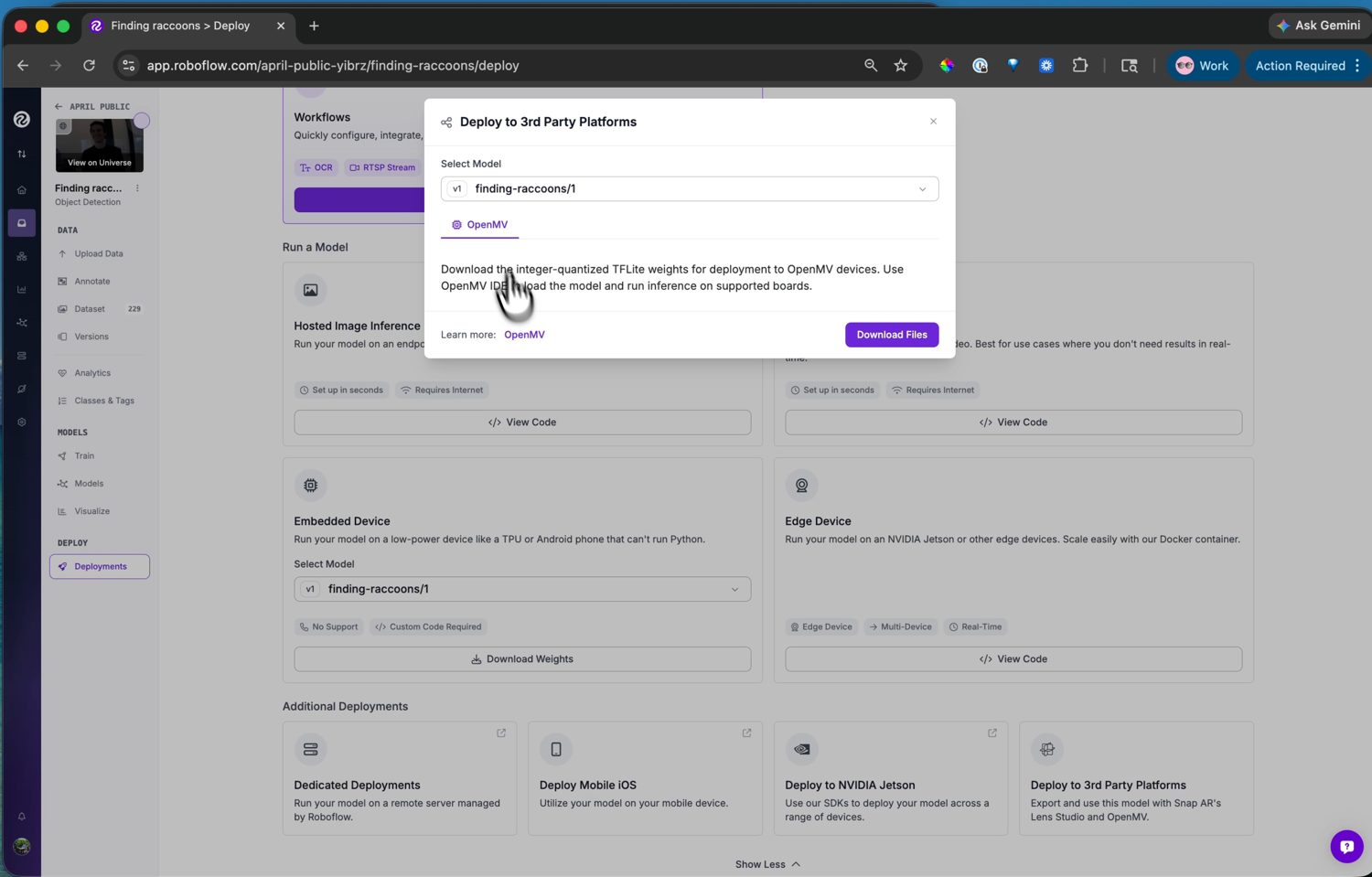
יעד הפריסה OpenMV – Download Files שומר את משקלי ה-.tflite המוכנים למצלמה.¶
13.7.5.2. טעינתו במצלמה¶
הוסיפו את קובץ ה-.tflite למצלמה באמצעות עורך ה-ROMFS של ה-IDE, אשר ממיר אותו עבור ה-NPU של הלוח כאשר ללוח יש כזה, ואז טענו אותו בסקריפט באמצעות ml.Model. מודלים רצים גם מכונן הפלאש של המצלמה – העתיקו את הקובץ והפנו את ml.Model אל הנתיב – אך ROMFS הוא הבית הטוב יותר: מודלים שם מבוצעים ישירות מזיכרון פלאש (flash) ללא העתקה ל-RAM.
הפלט הגולמי של מודל זיהוי הוא טנסור של קואורדינטות תיבה וציוני מחלקה שעדיין זקוק לפענוח. מזהי משפחת YOLO של Roboflow מפענחים באמצעות מפענחי הפוסט שהמצלמה כוללת ב-ml.postprocessing.ultralytics, כך שכמה שורות מחברות את המודל למפענח שלו ויש לכם תיבות ותוויות.
ראה גם
פרק הלמידה החישובית להרצת מודלים עם מודול ה-ml – טעינה, צינור ההסקה, וכן ההדרכה המפורטת על פענוח פלט ממשפחת YOLO.